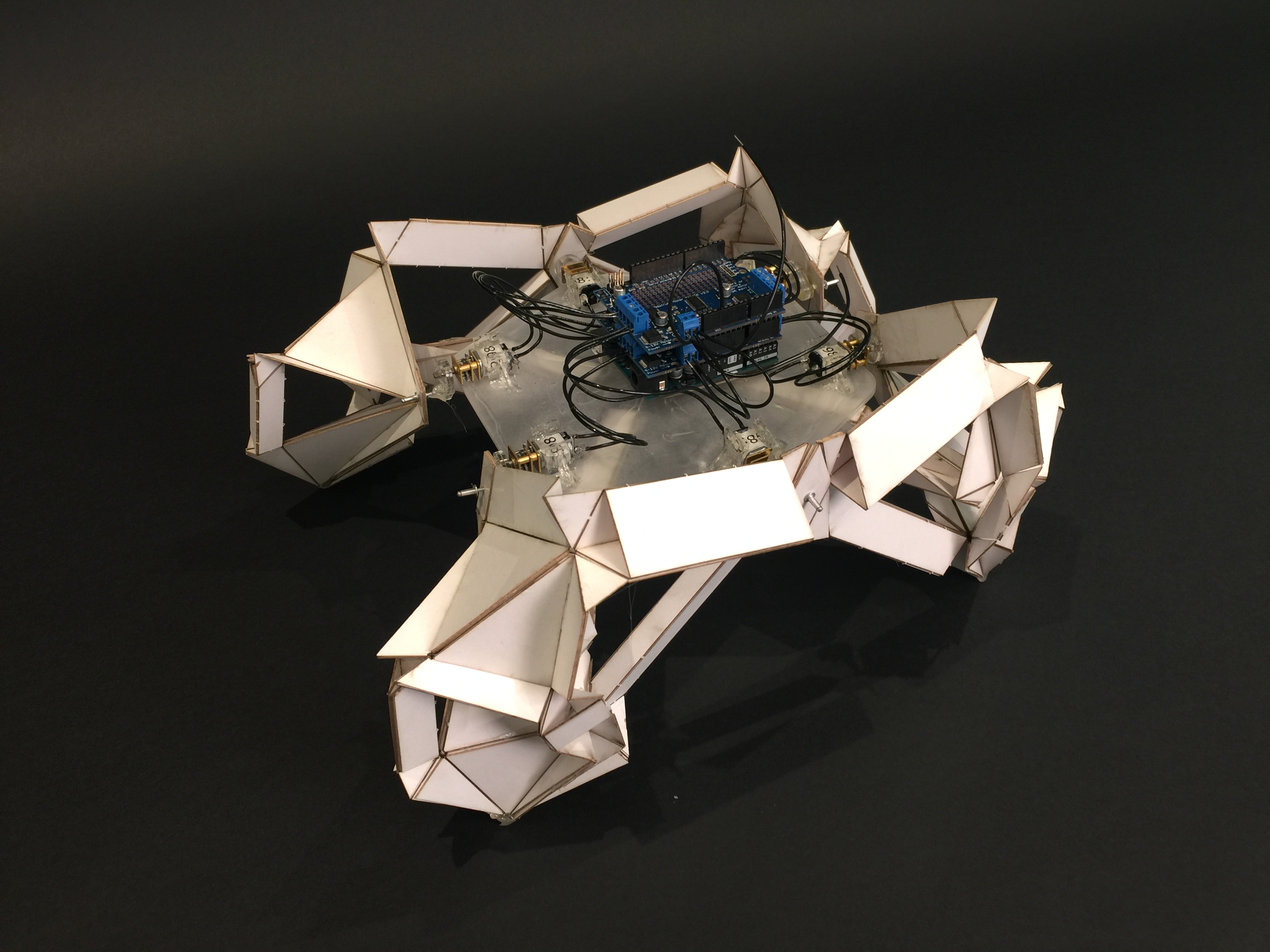
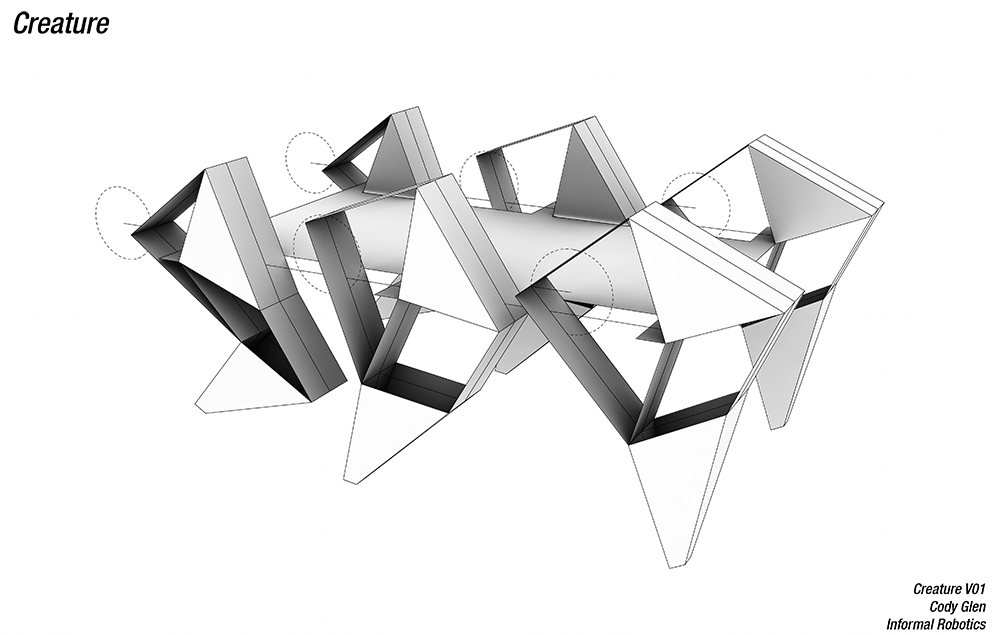




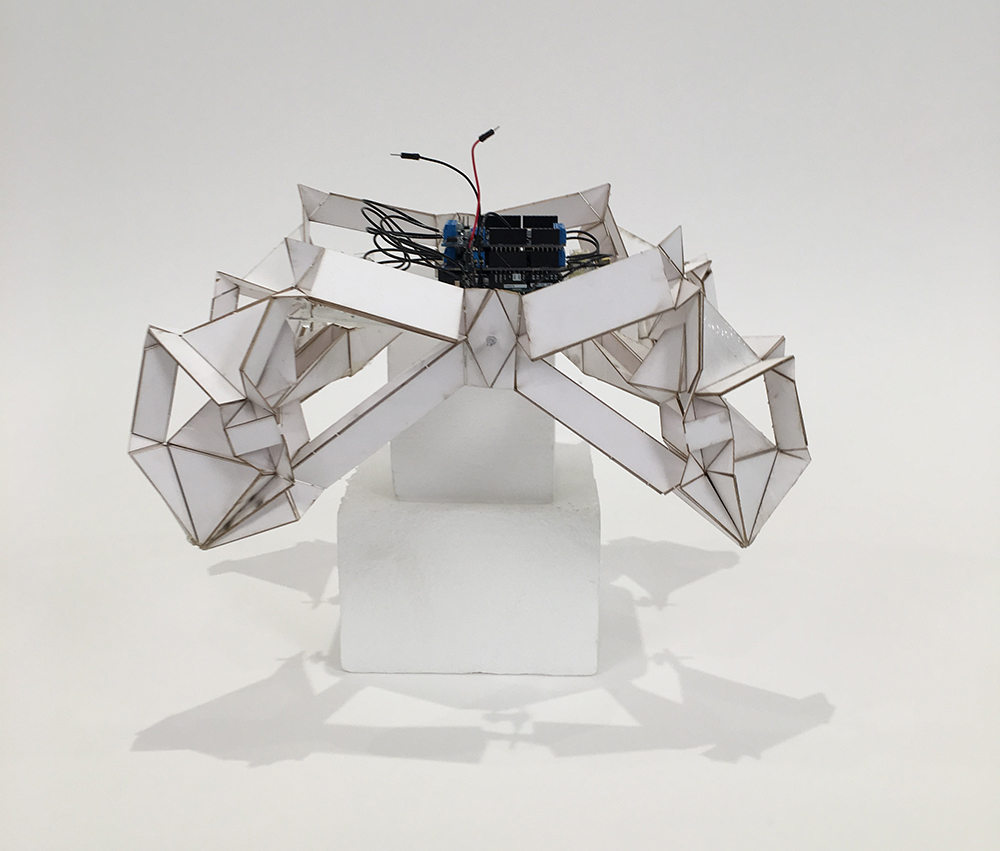
Description:
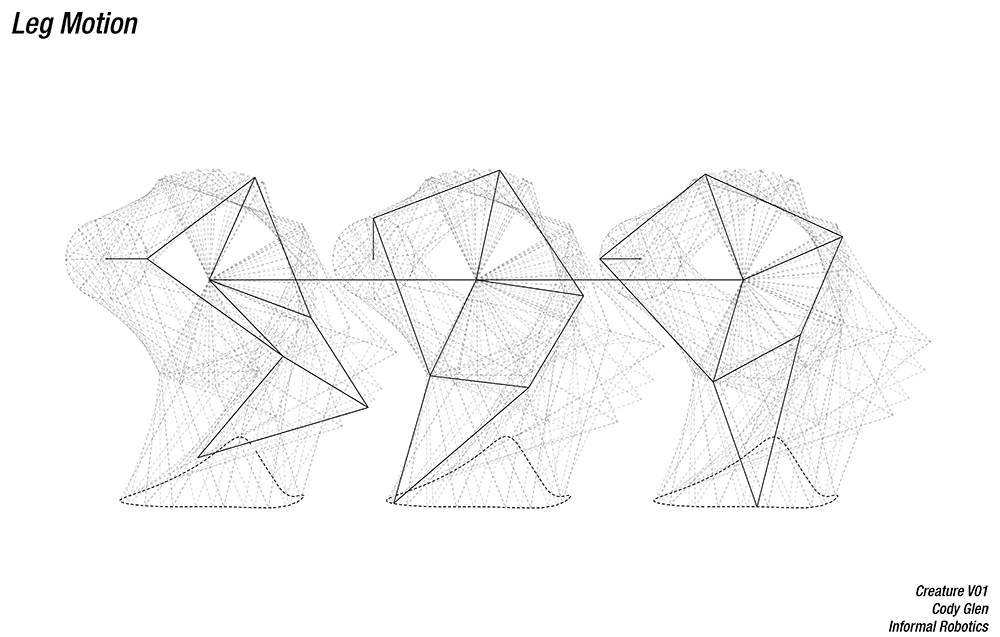
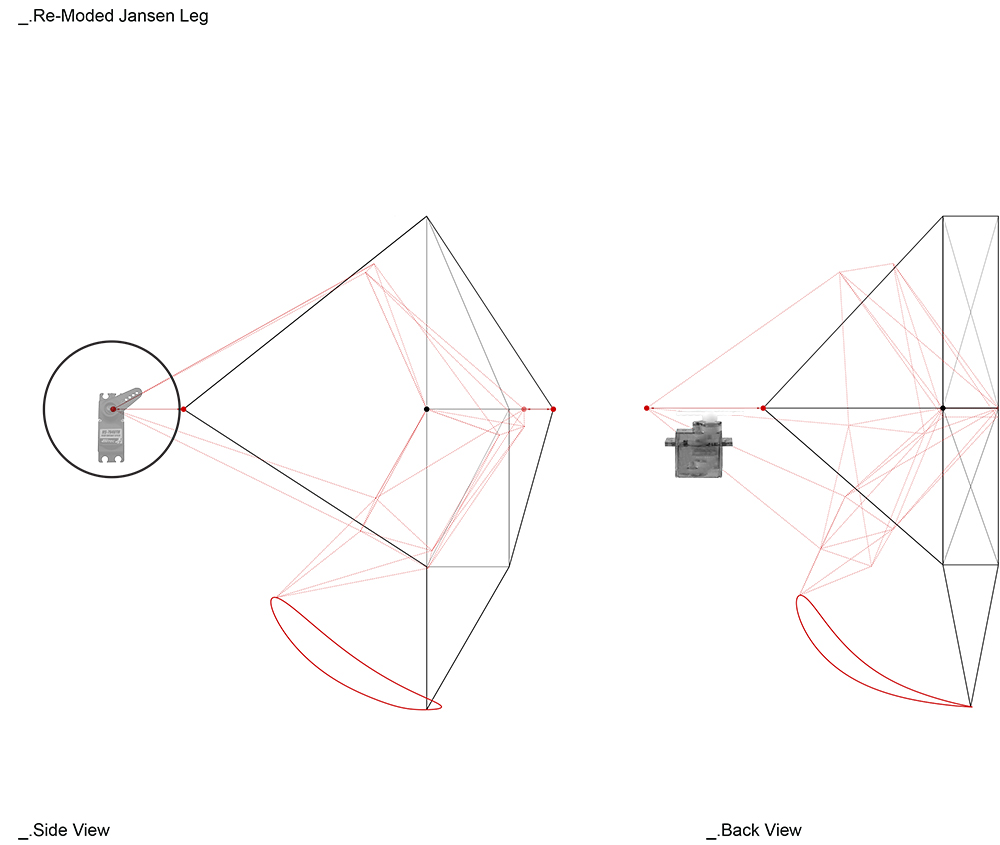
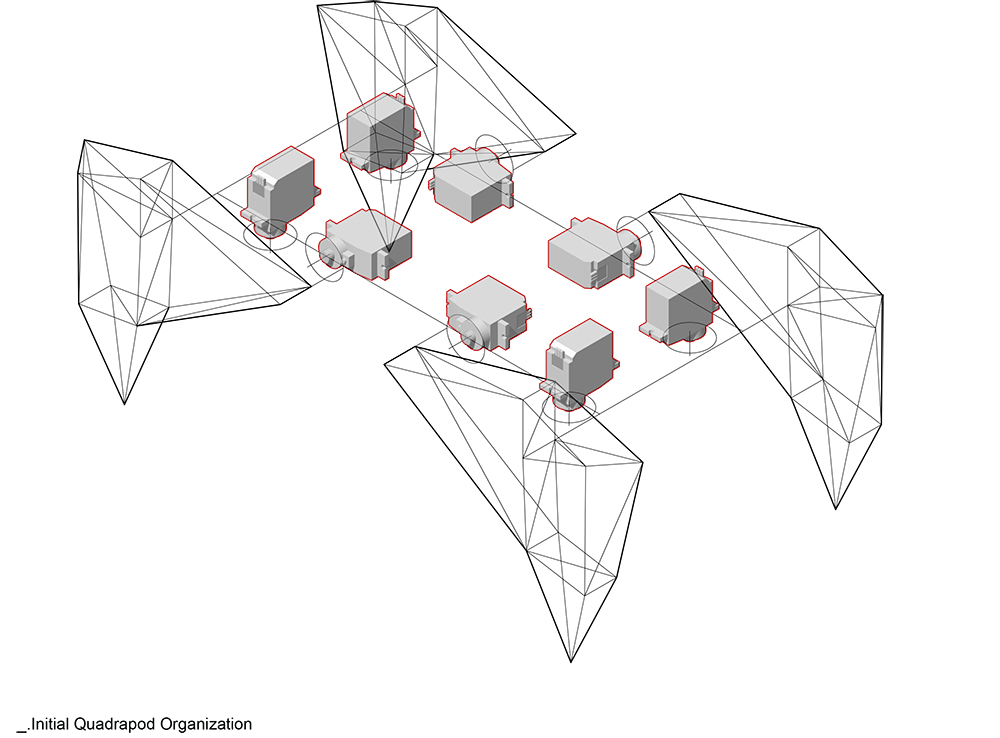
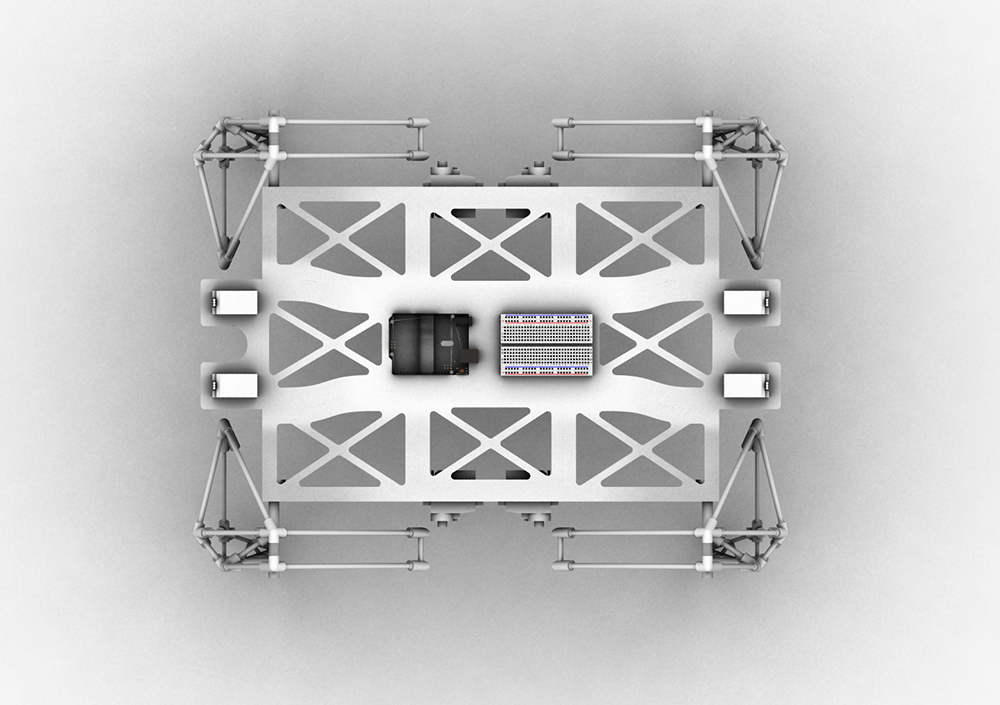
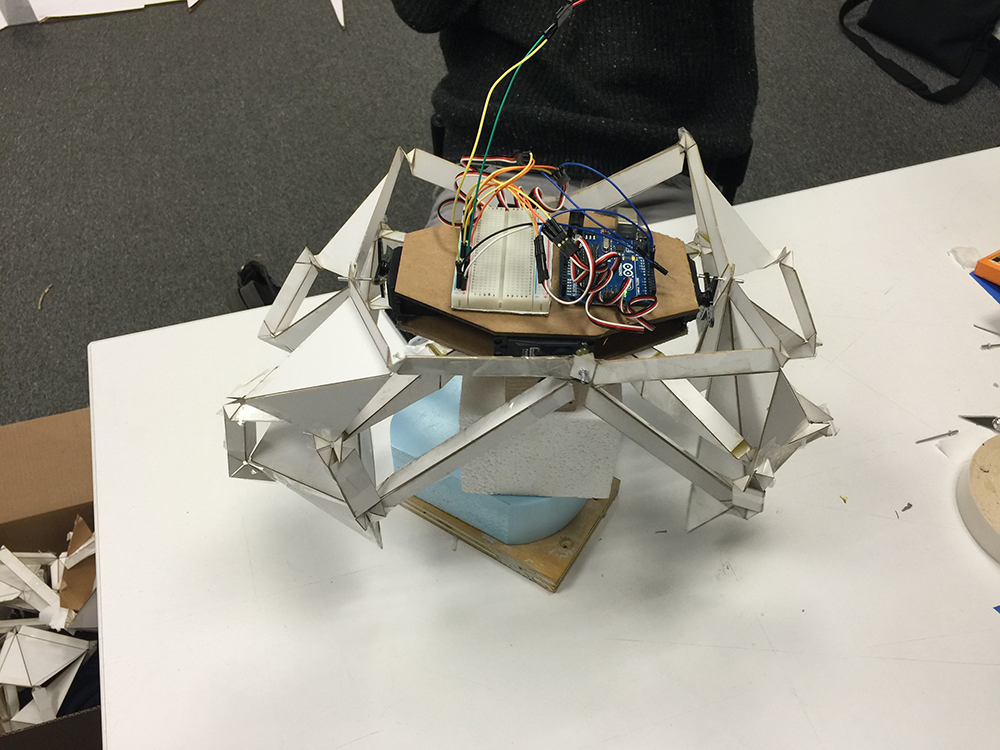
This project attempted to 3dimensionalize a Jansen mechanism, and to give it two additional degrees of freedom.
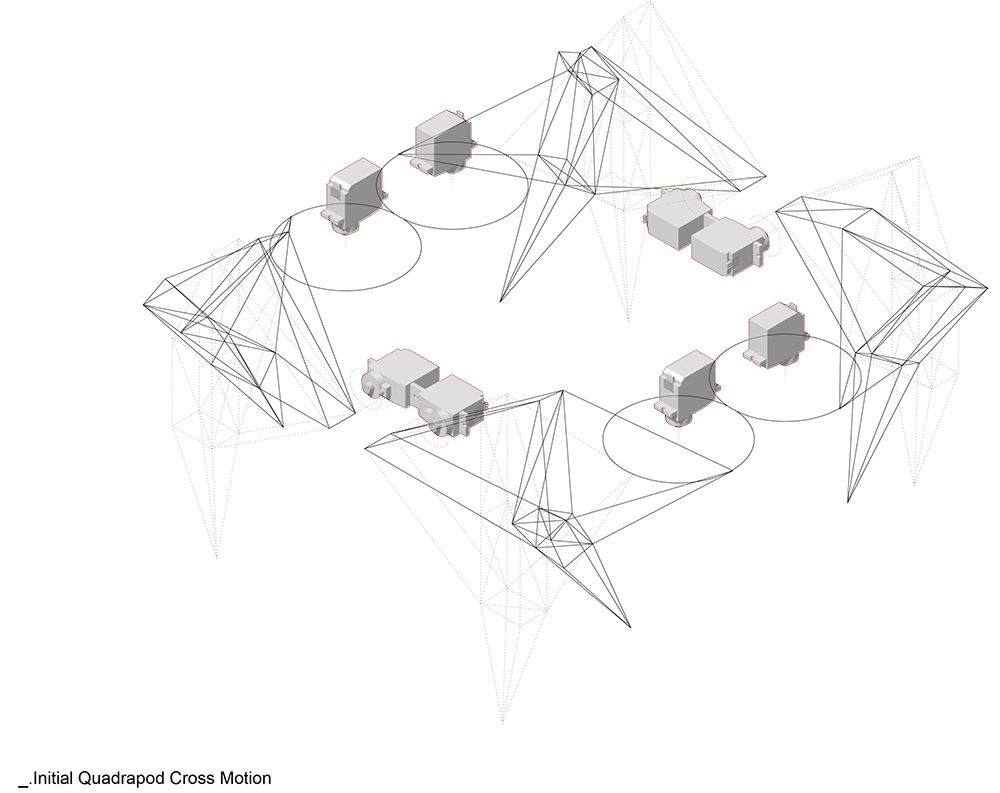
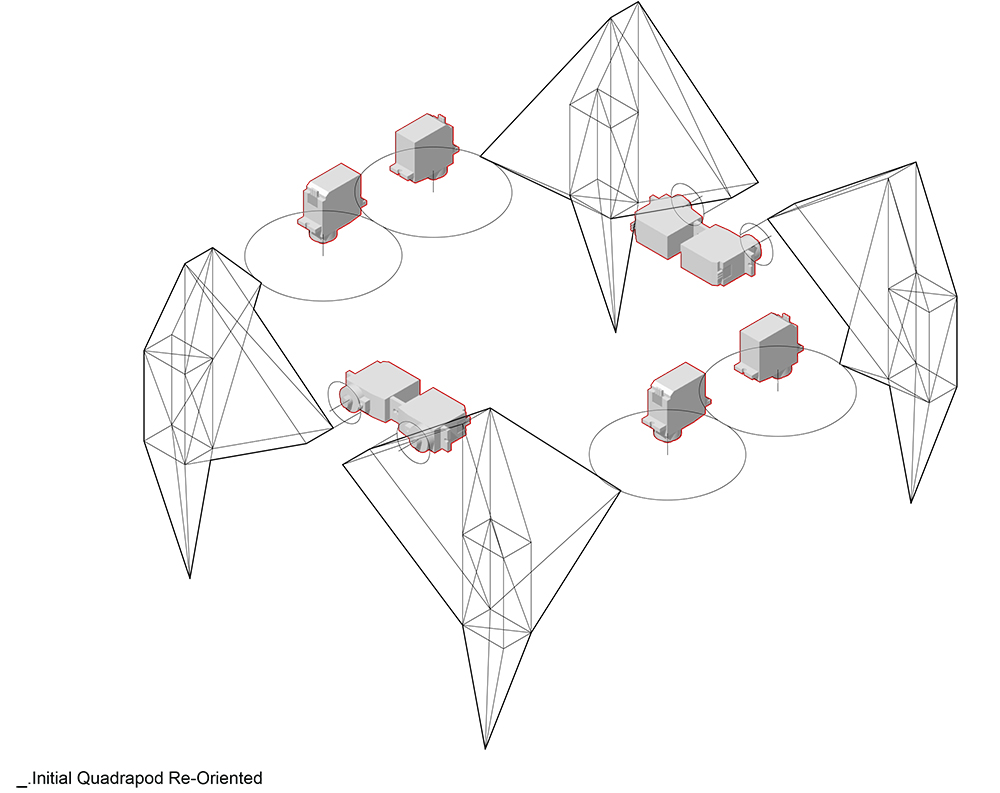
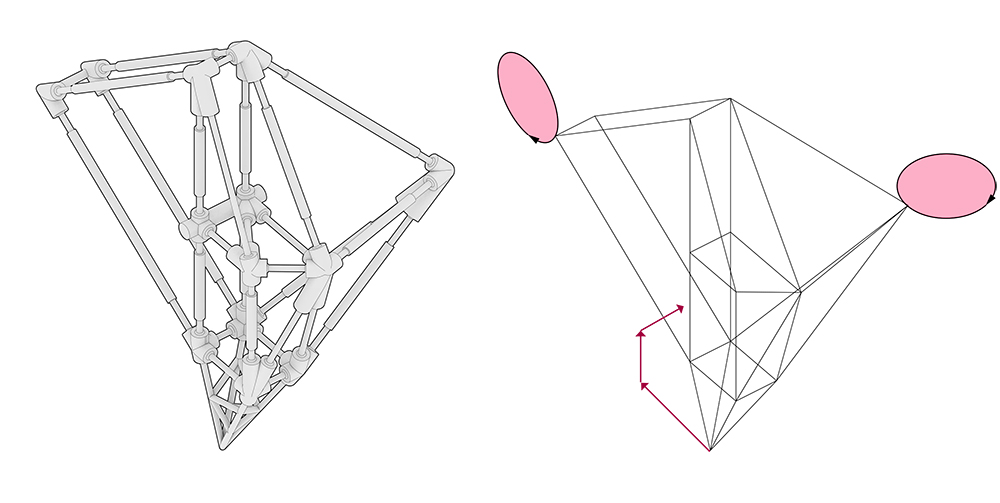
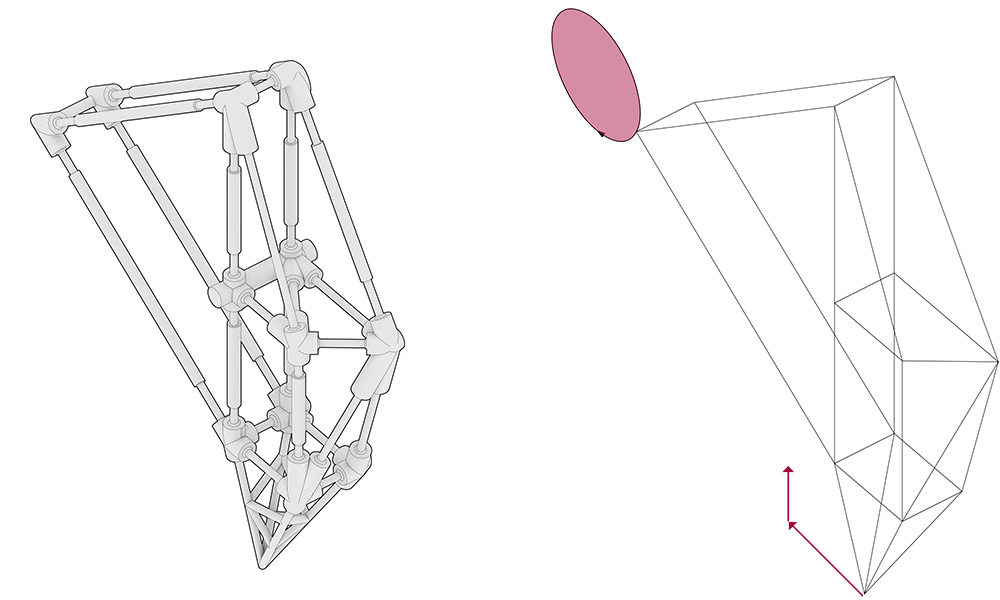
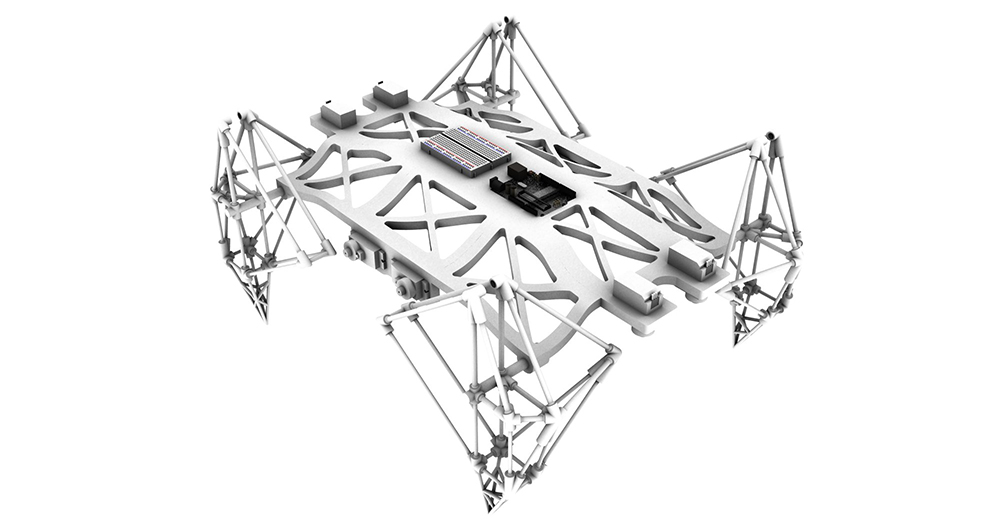
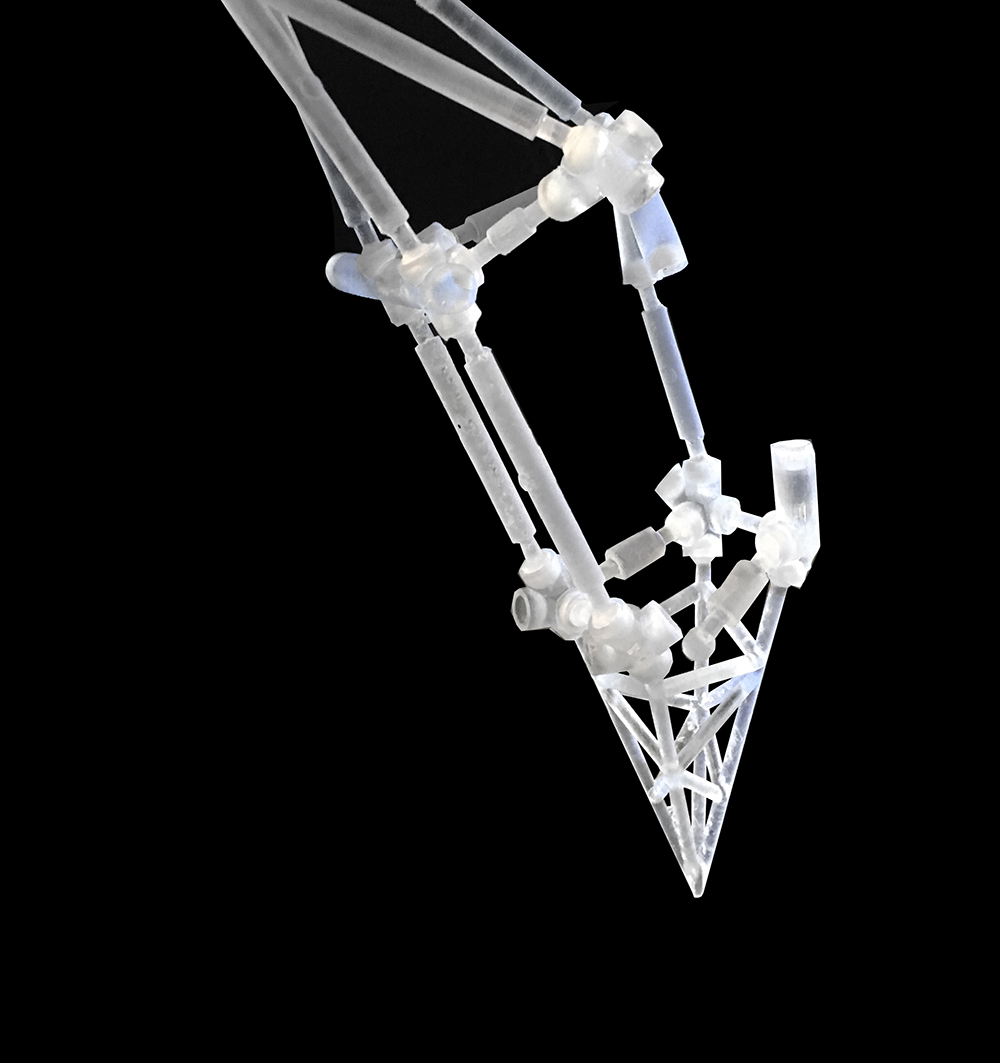
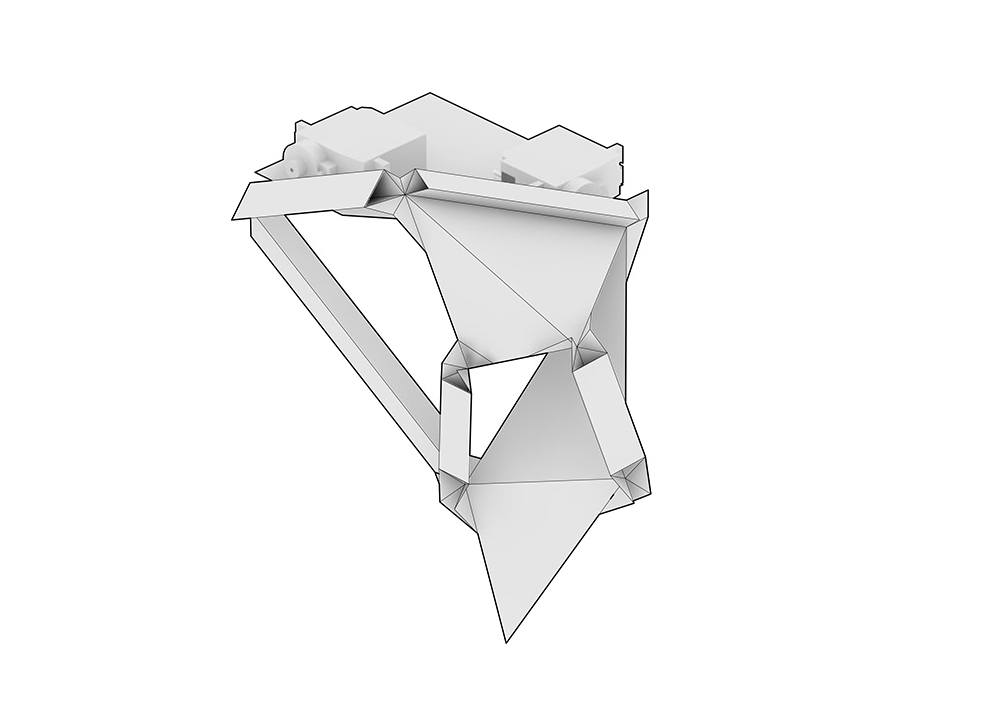
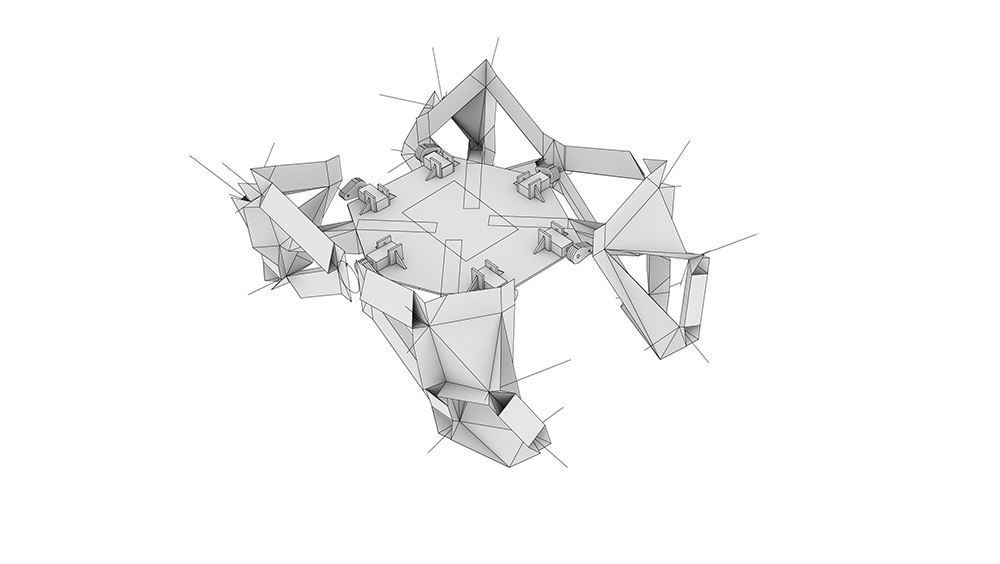
Starting with a 2d Jansen mechanism and rotating it 90 degrees about it's z axis, the spaceframe was then resolved to allow the mechanism to move in 3 axis with 4 degrees of freedom.
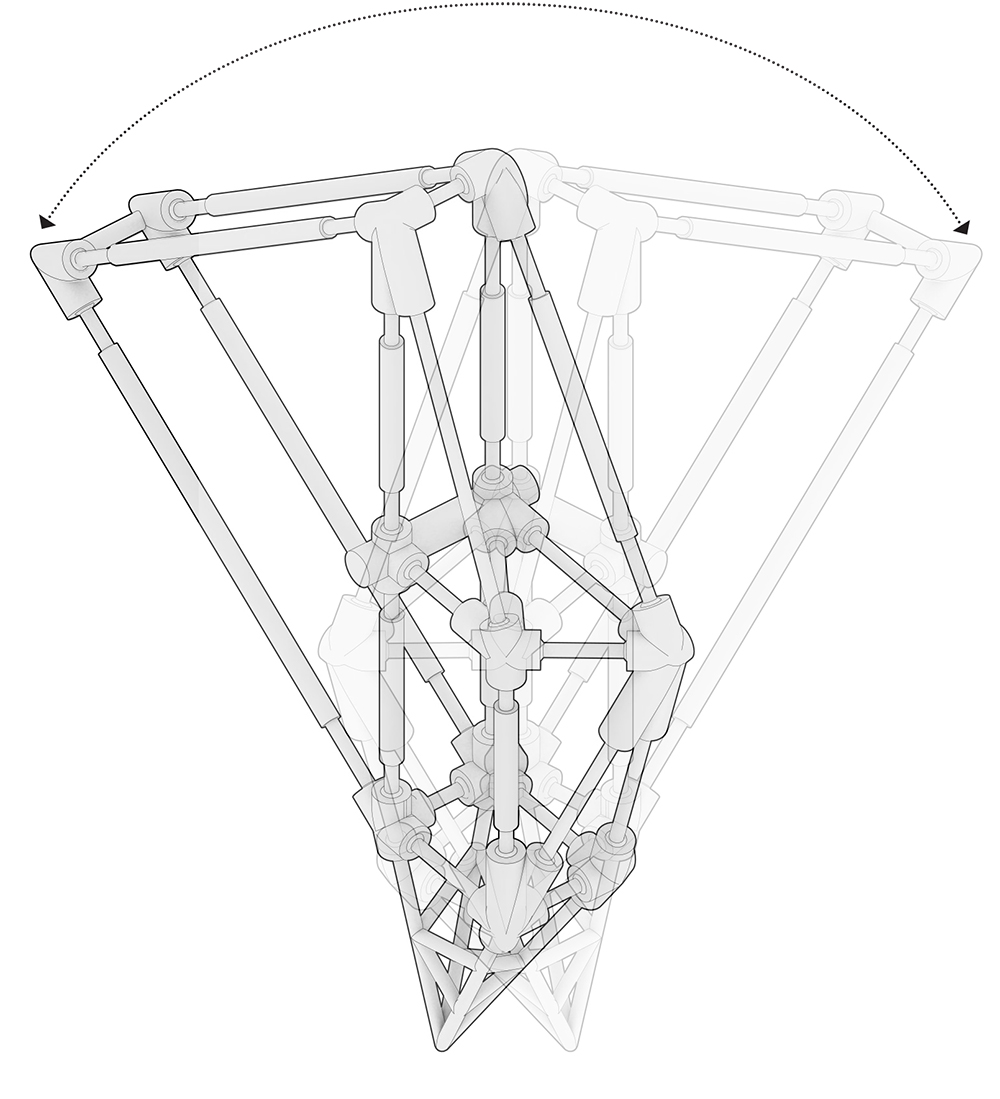
Although this increased mechanical complexity, we were confident we could produce a leg mechanism with the desired behaviors and simulations confirmed our hypothesis.
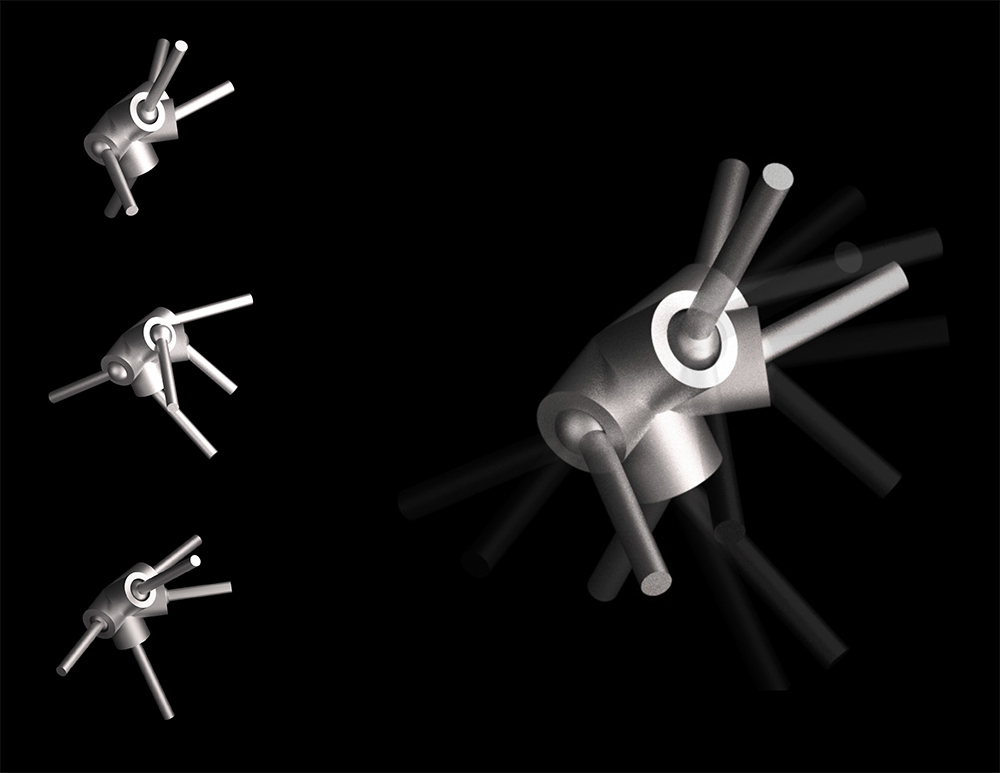
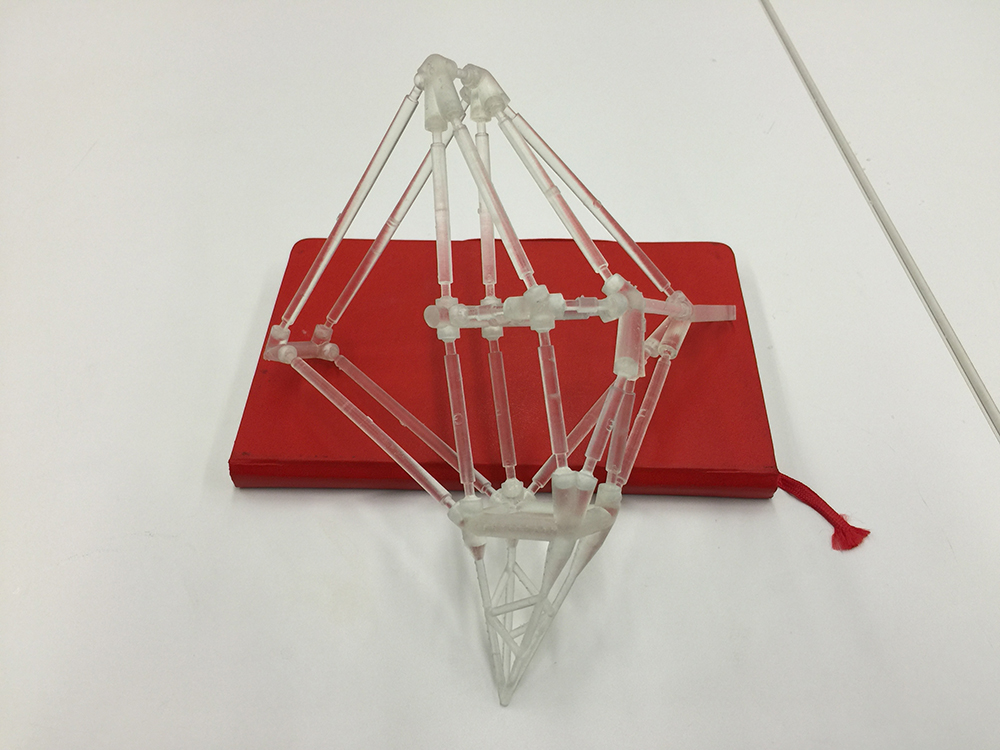
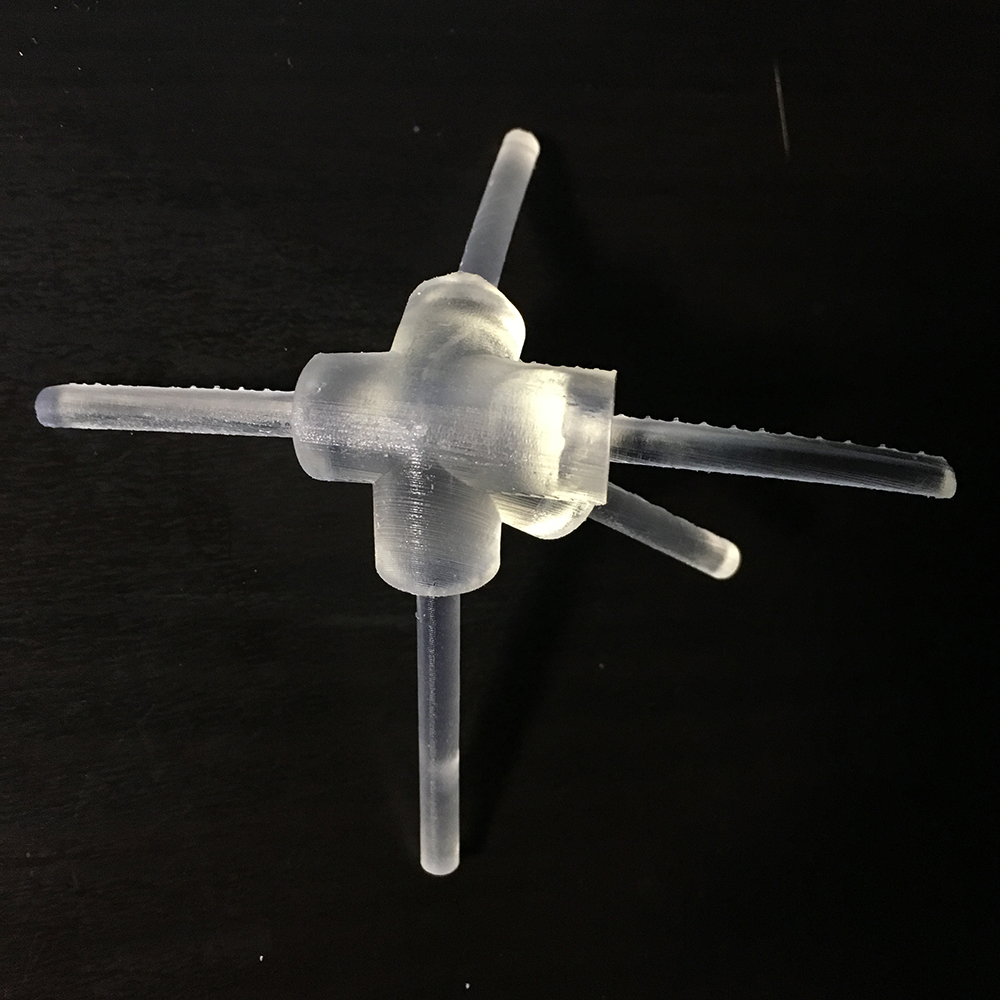
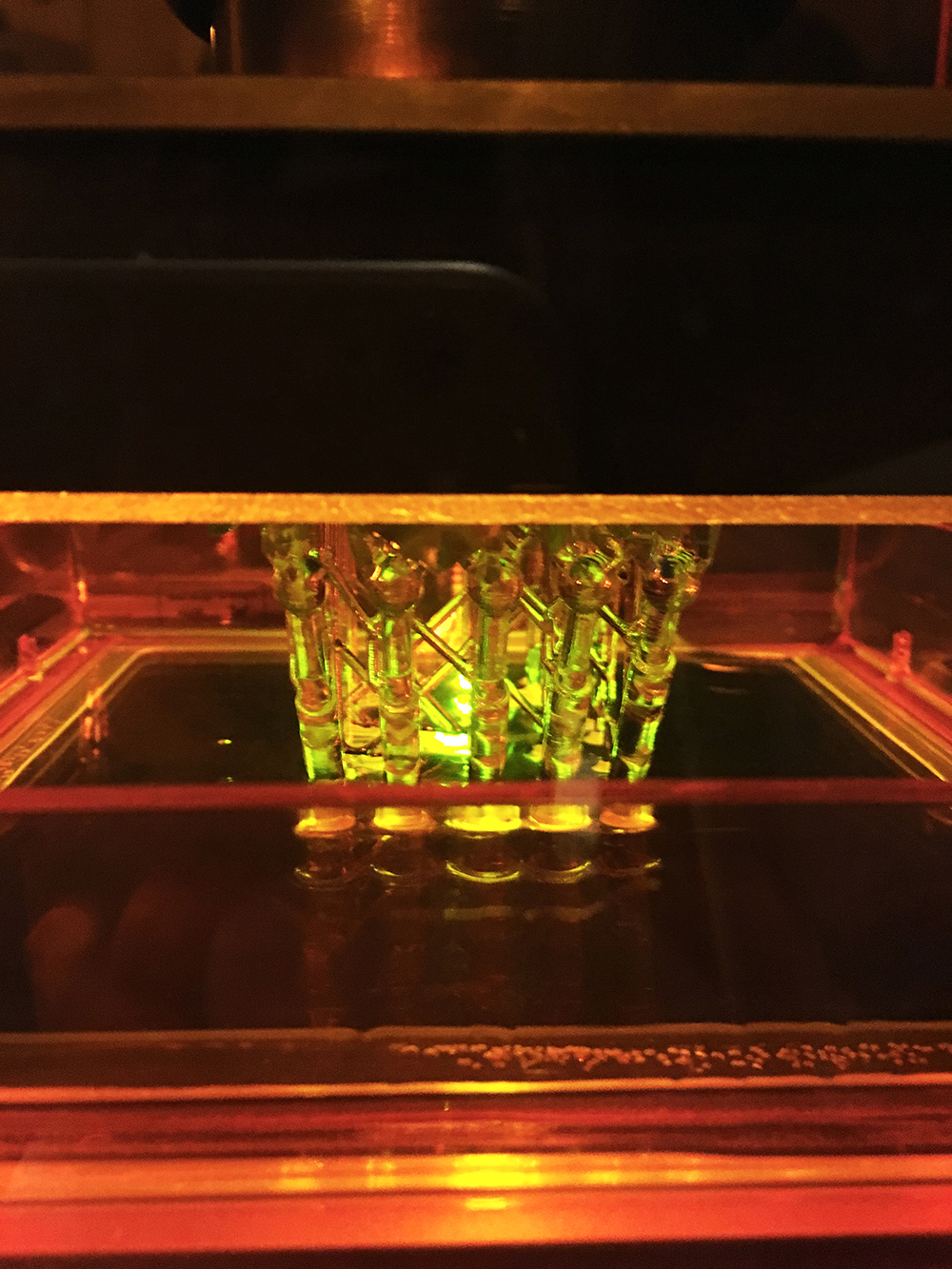
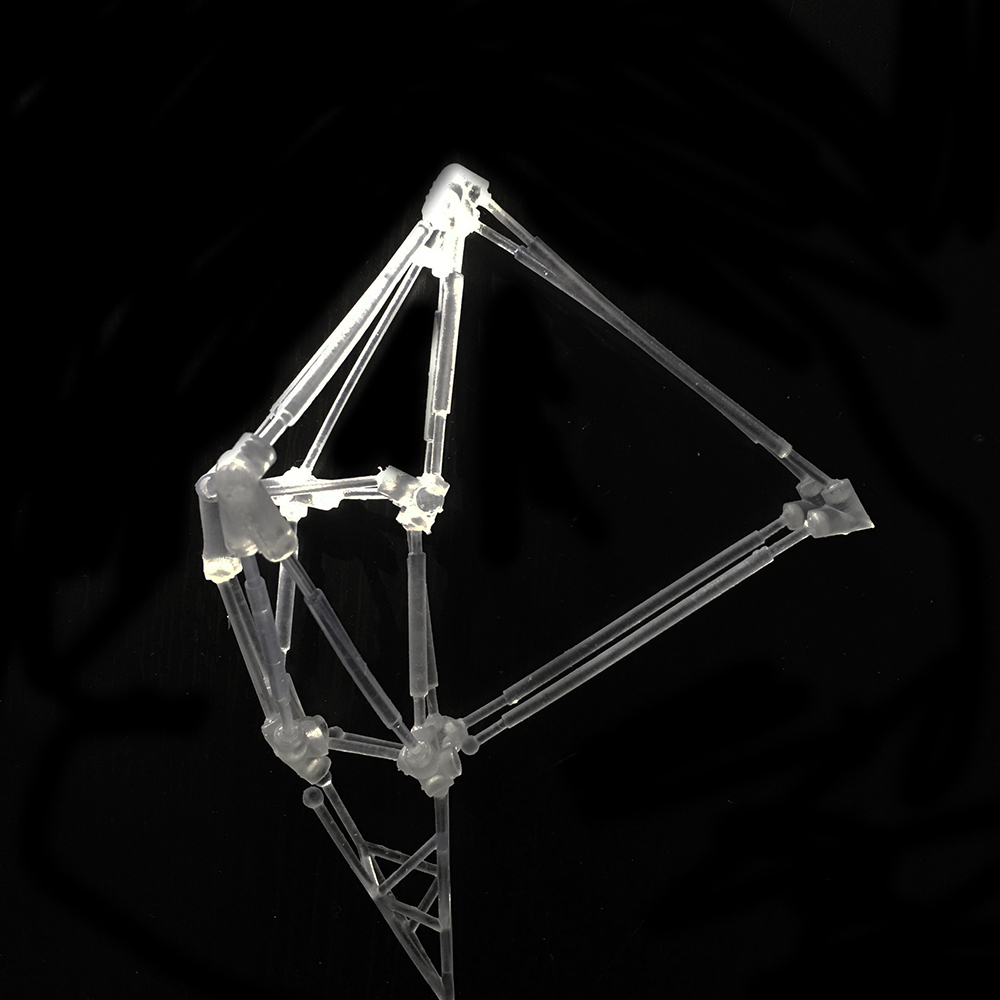
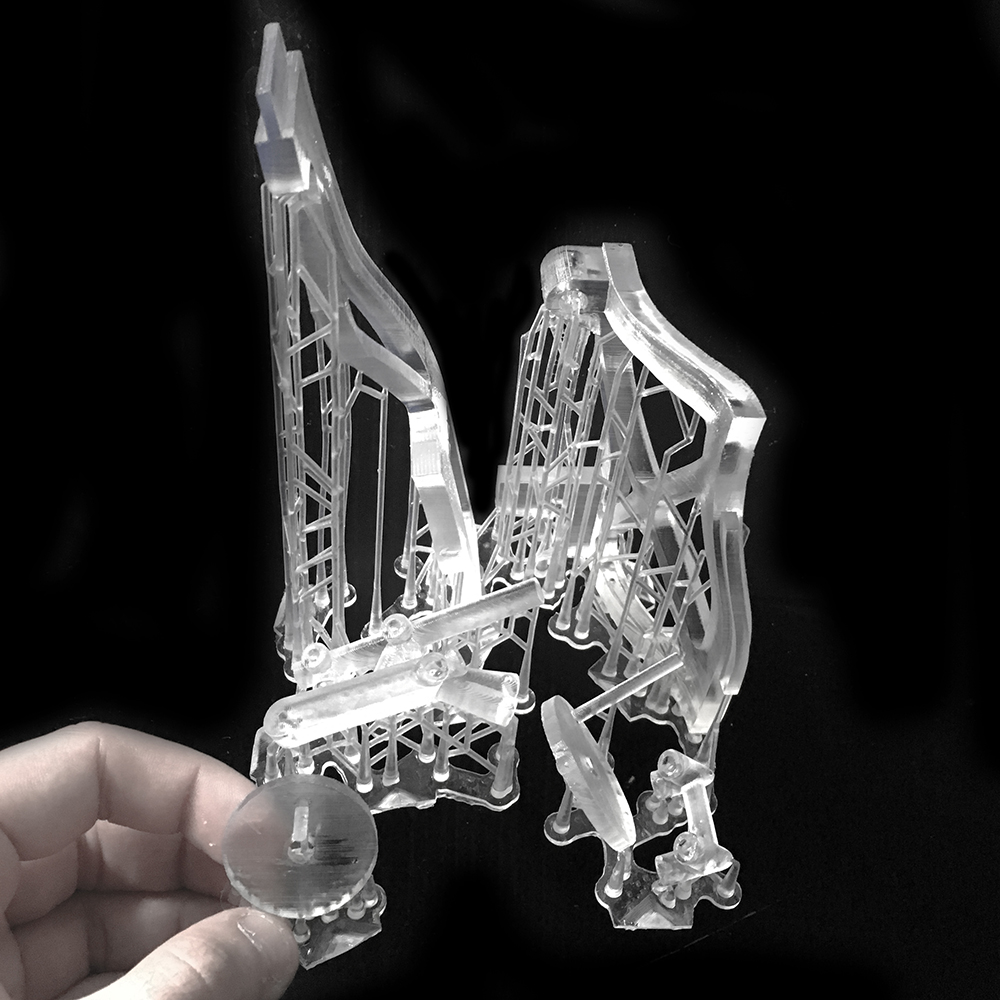
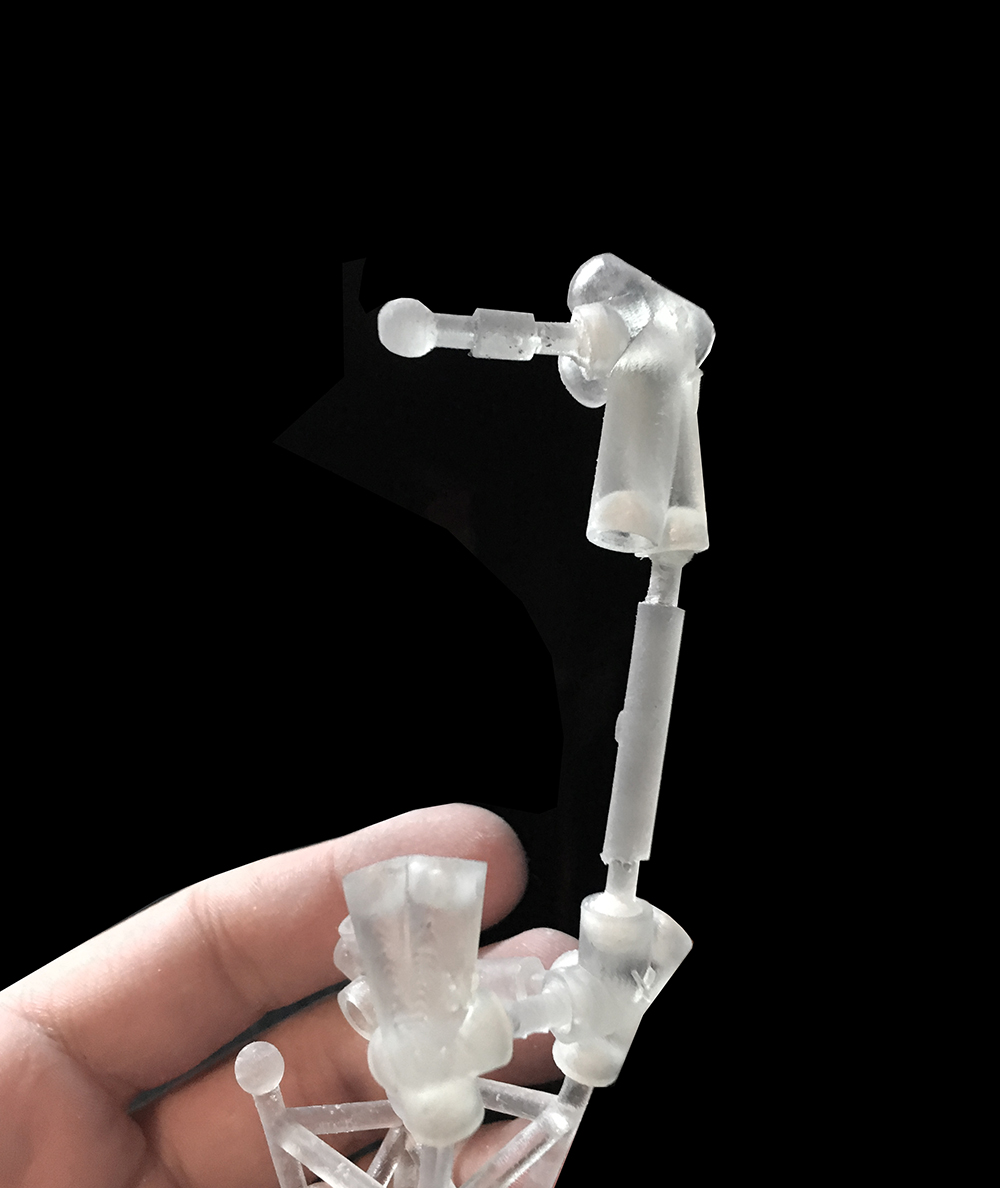
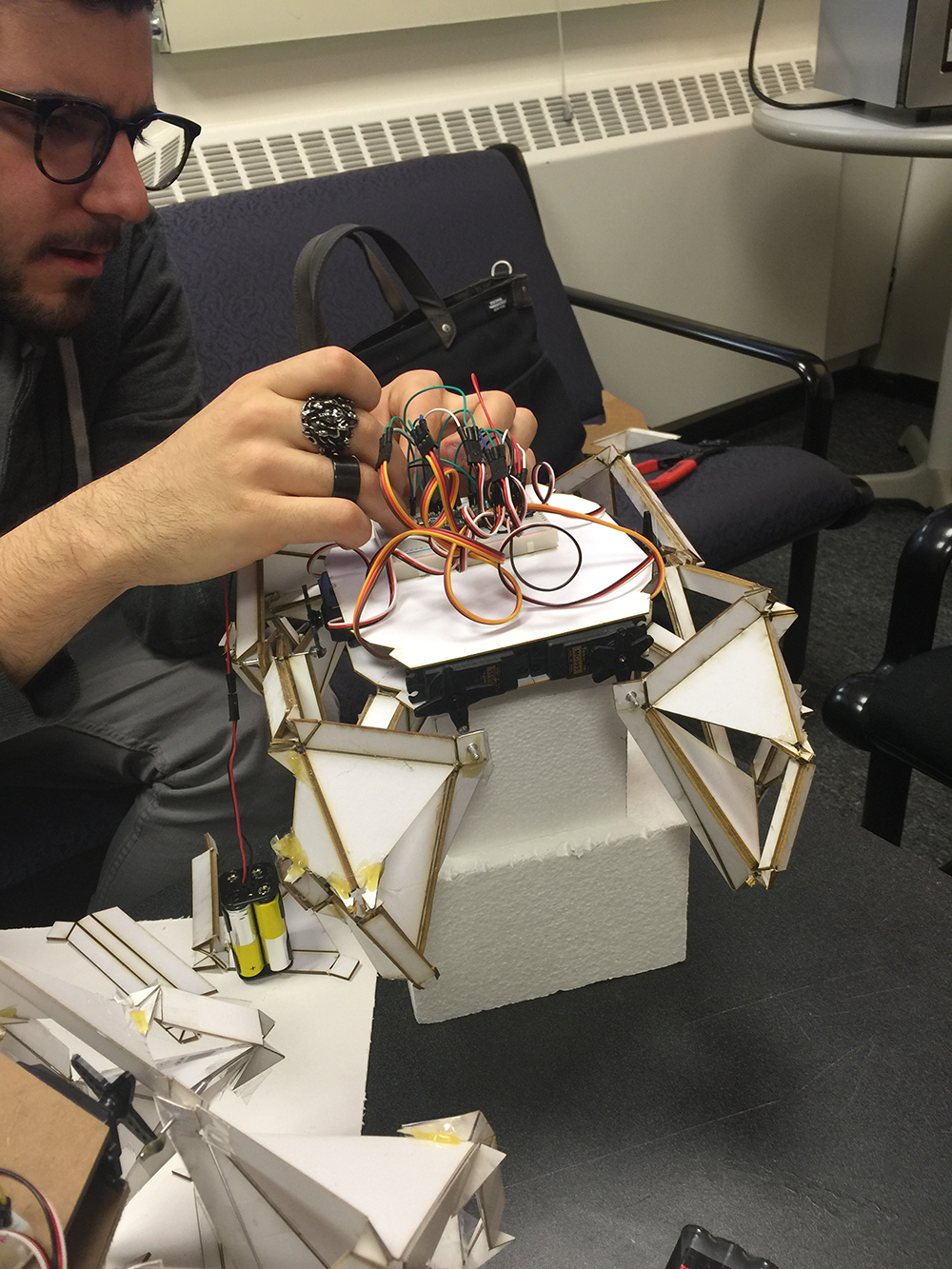
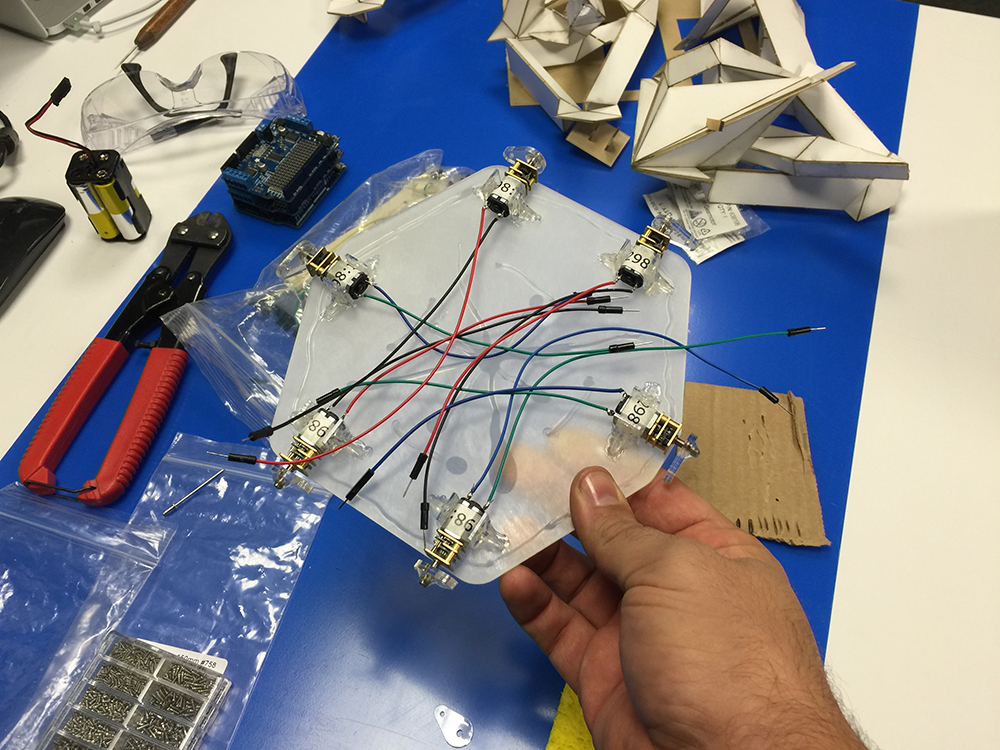
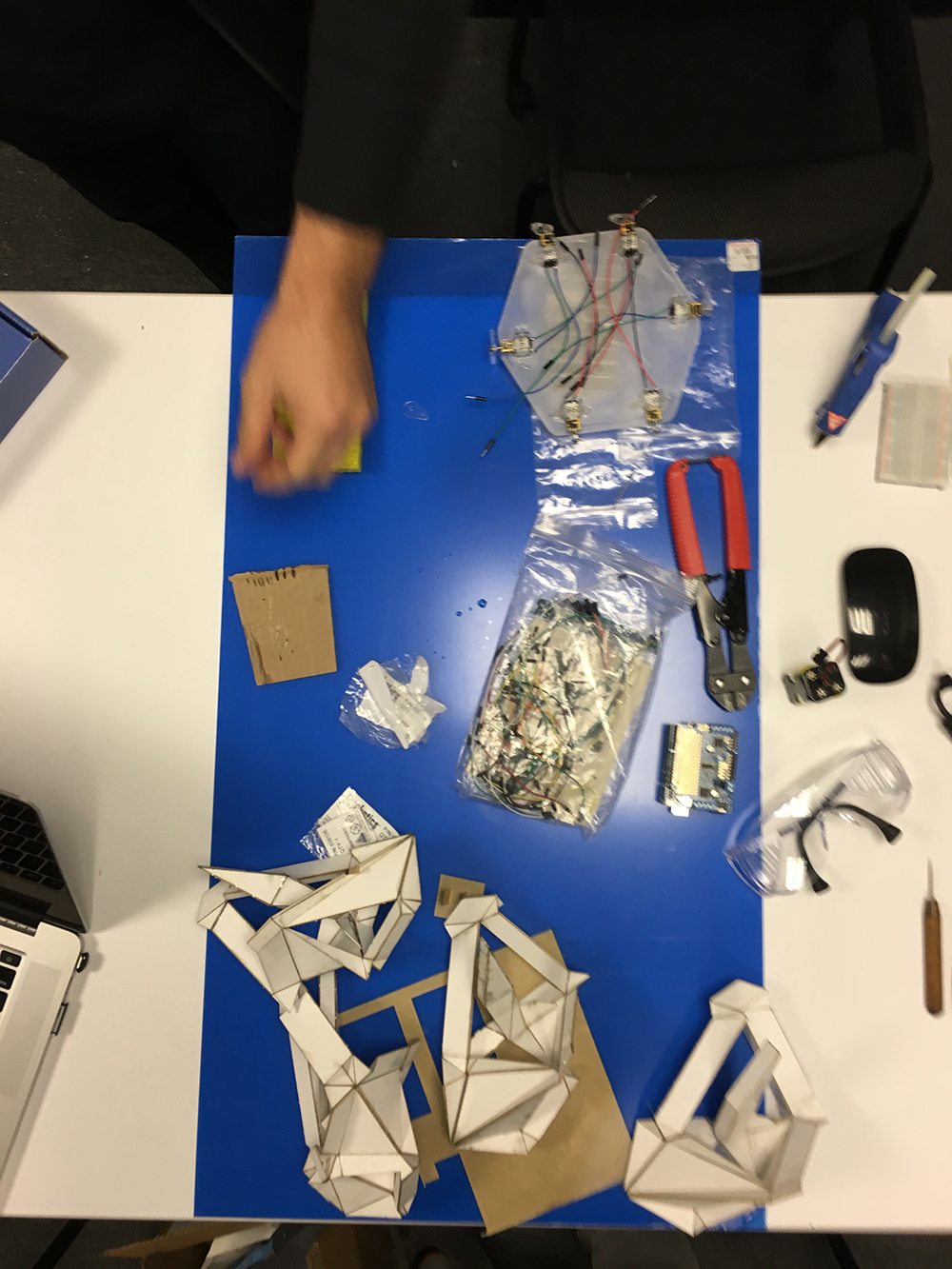
We then prototyped the leg mechanism via 3d printing, but the joints were too complex to be printed efficiently. Moreover, they did not articulate smoothly the way we needed them to for a leg to work.
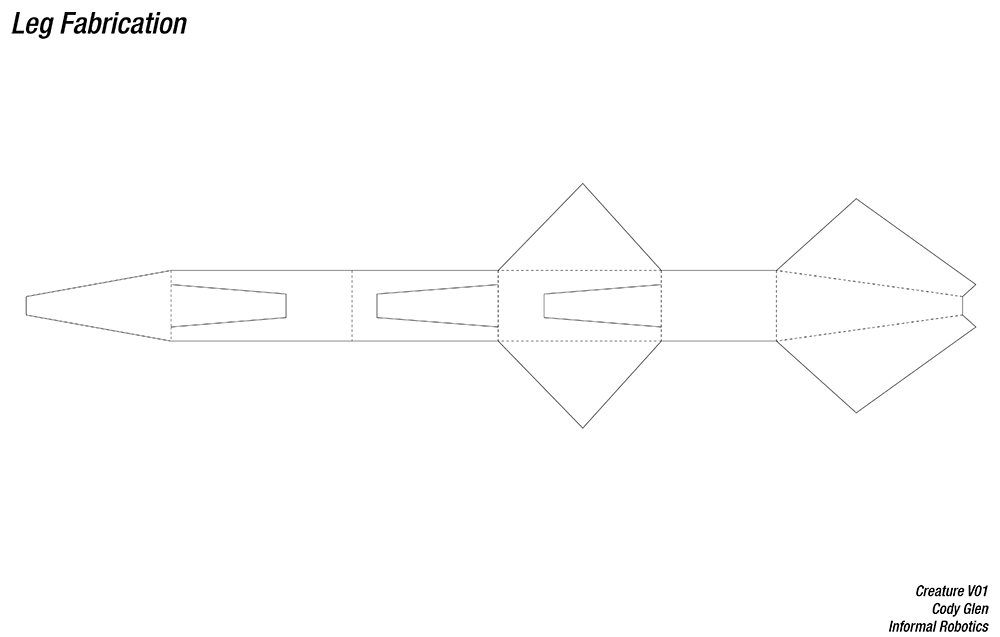
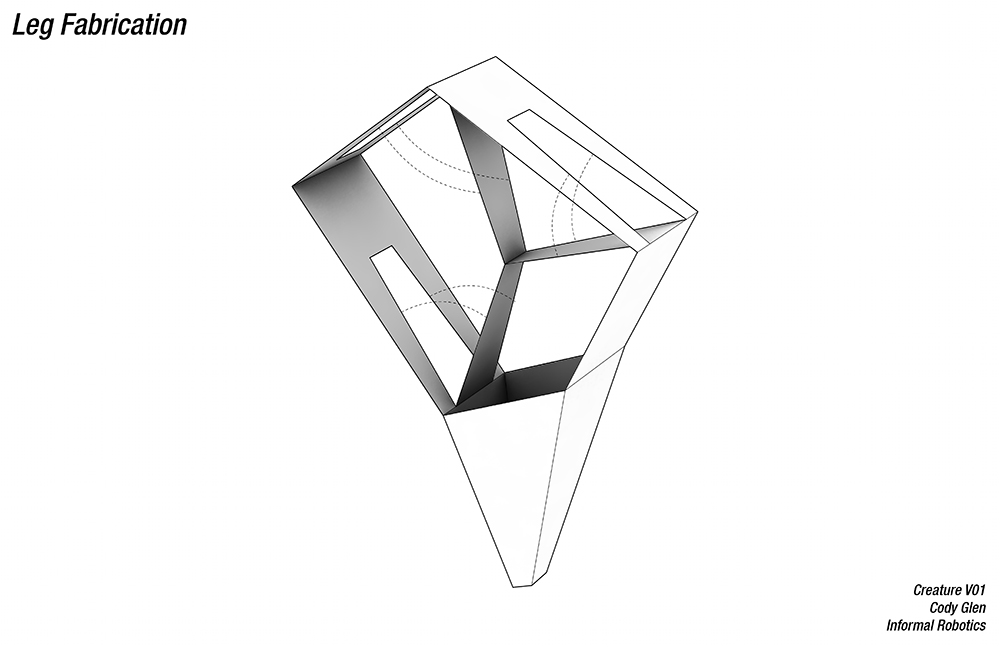
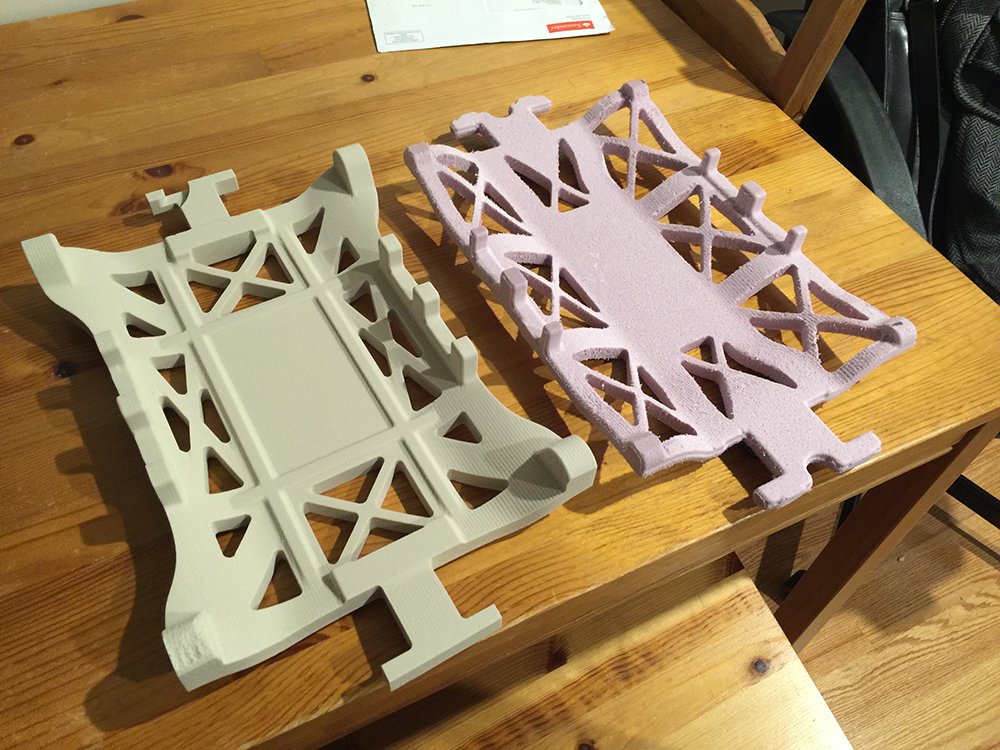
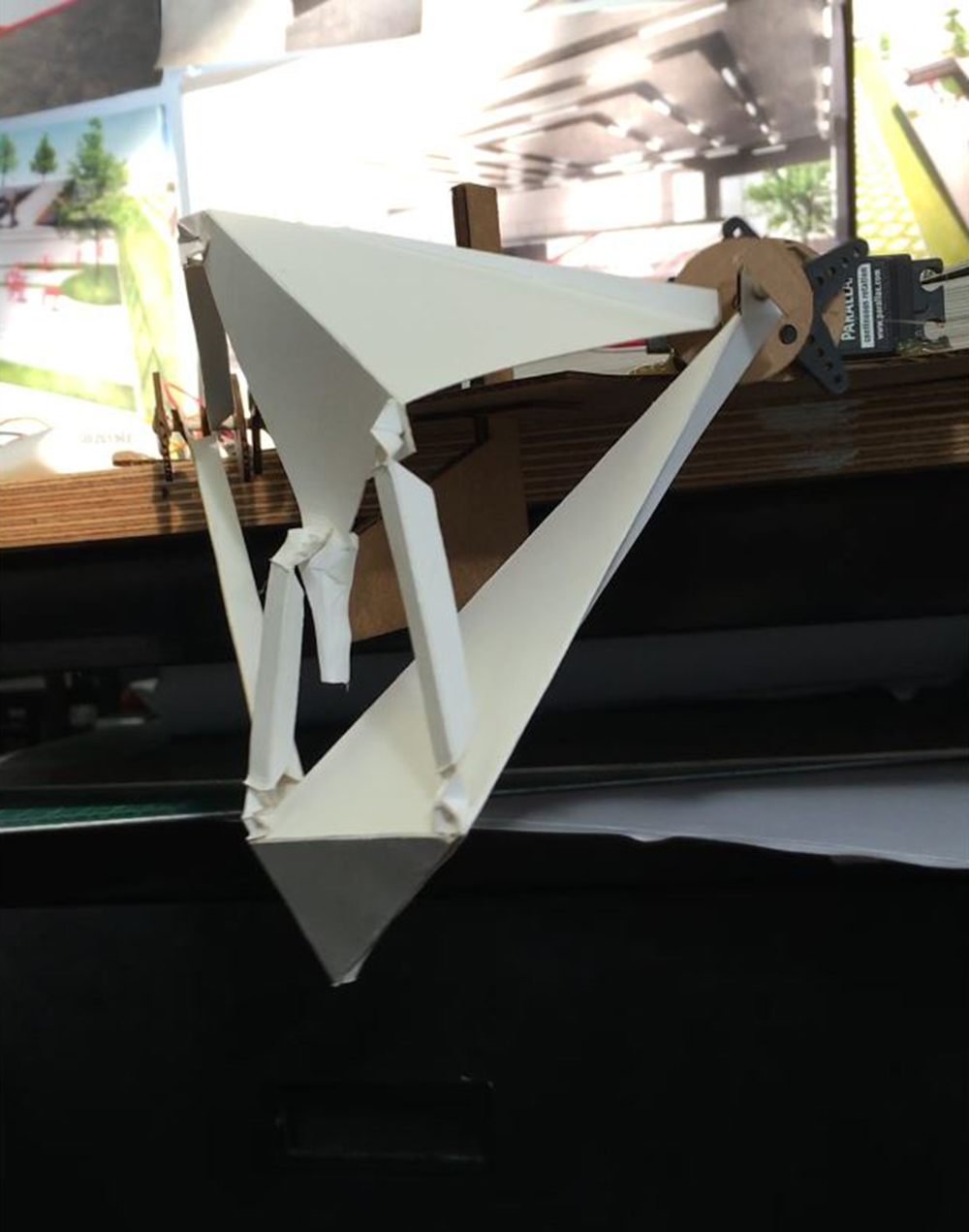
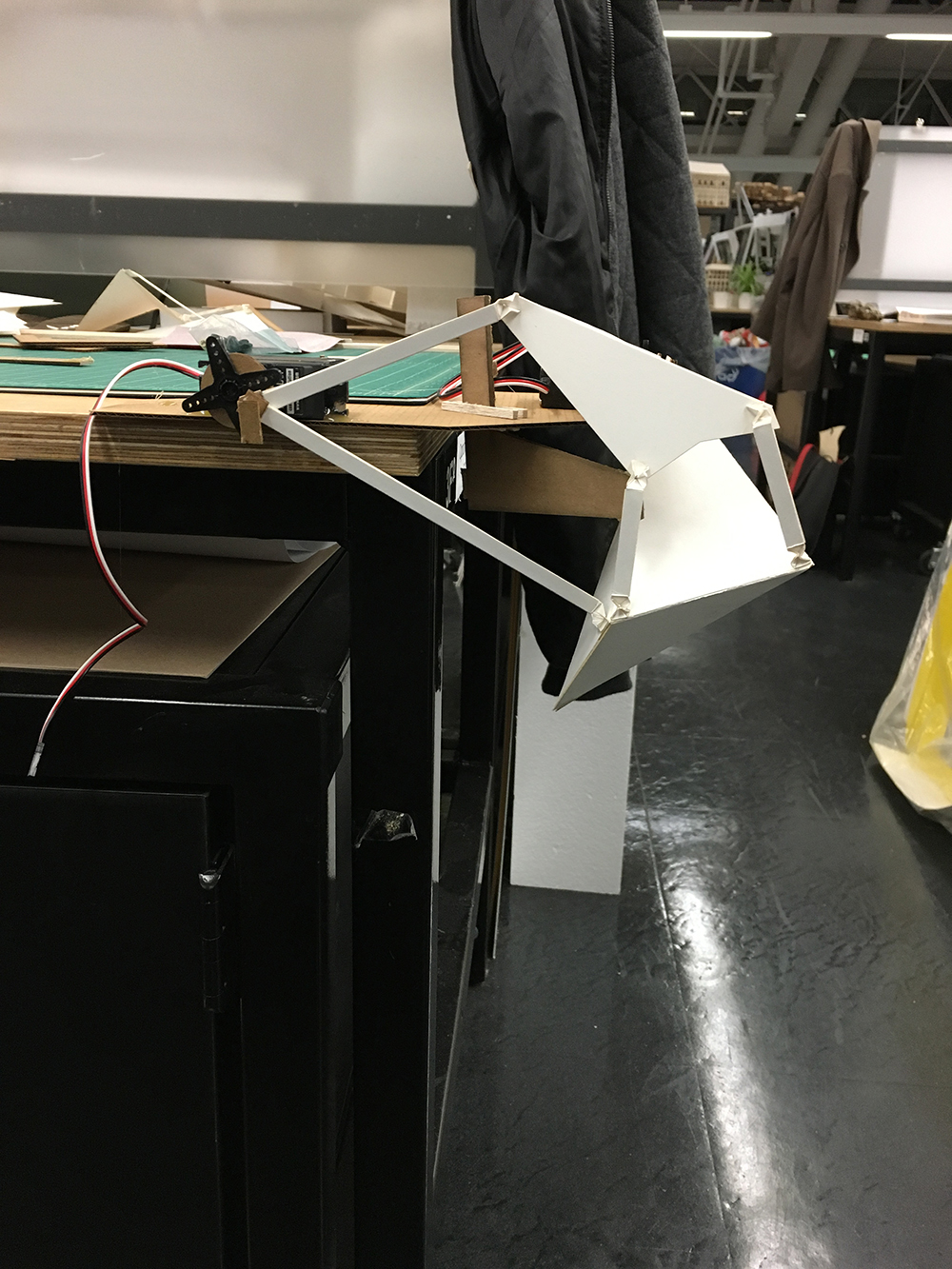
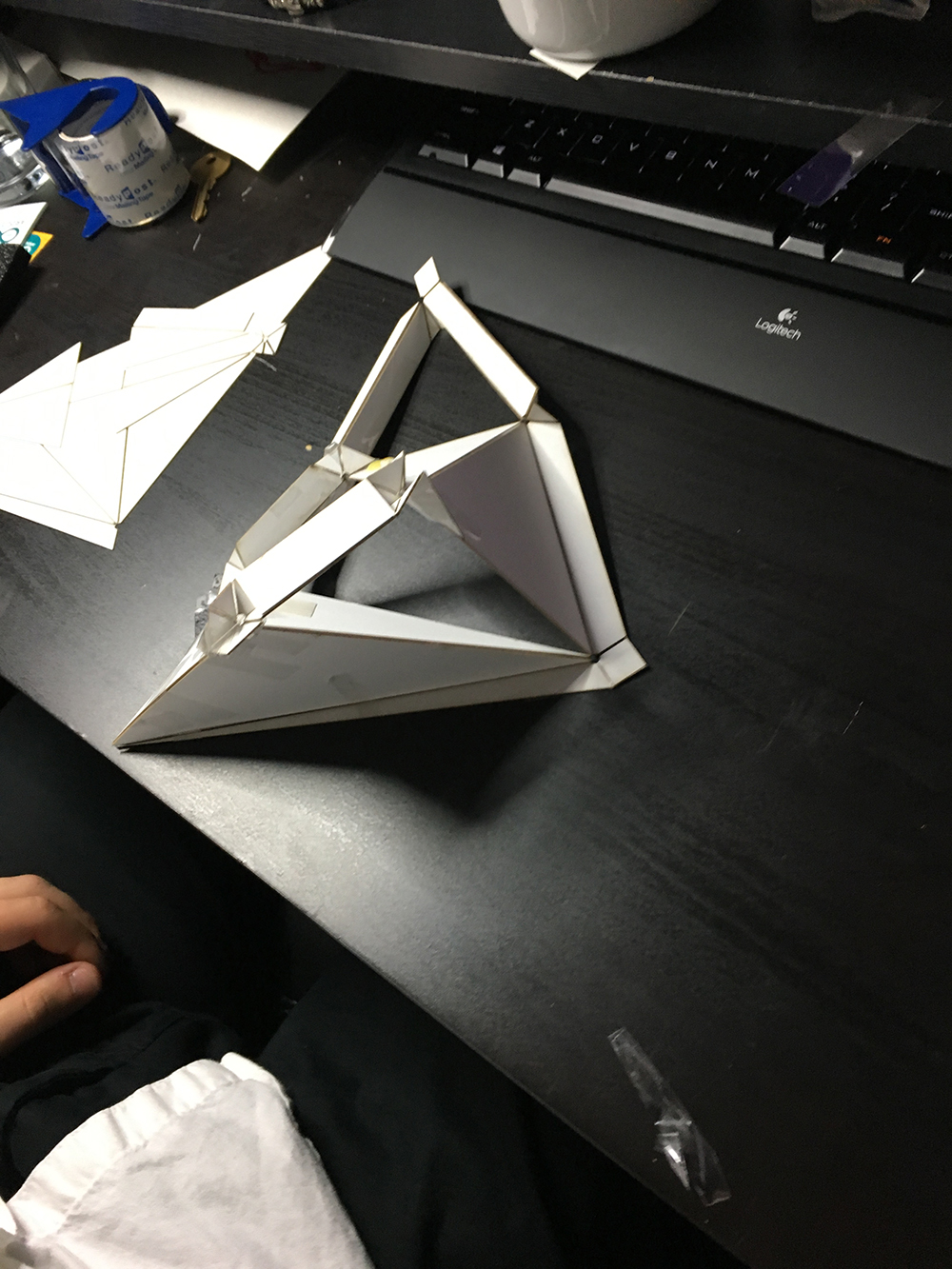
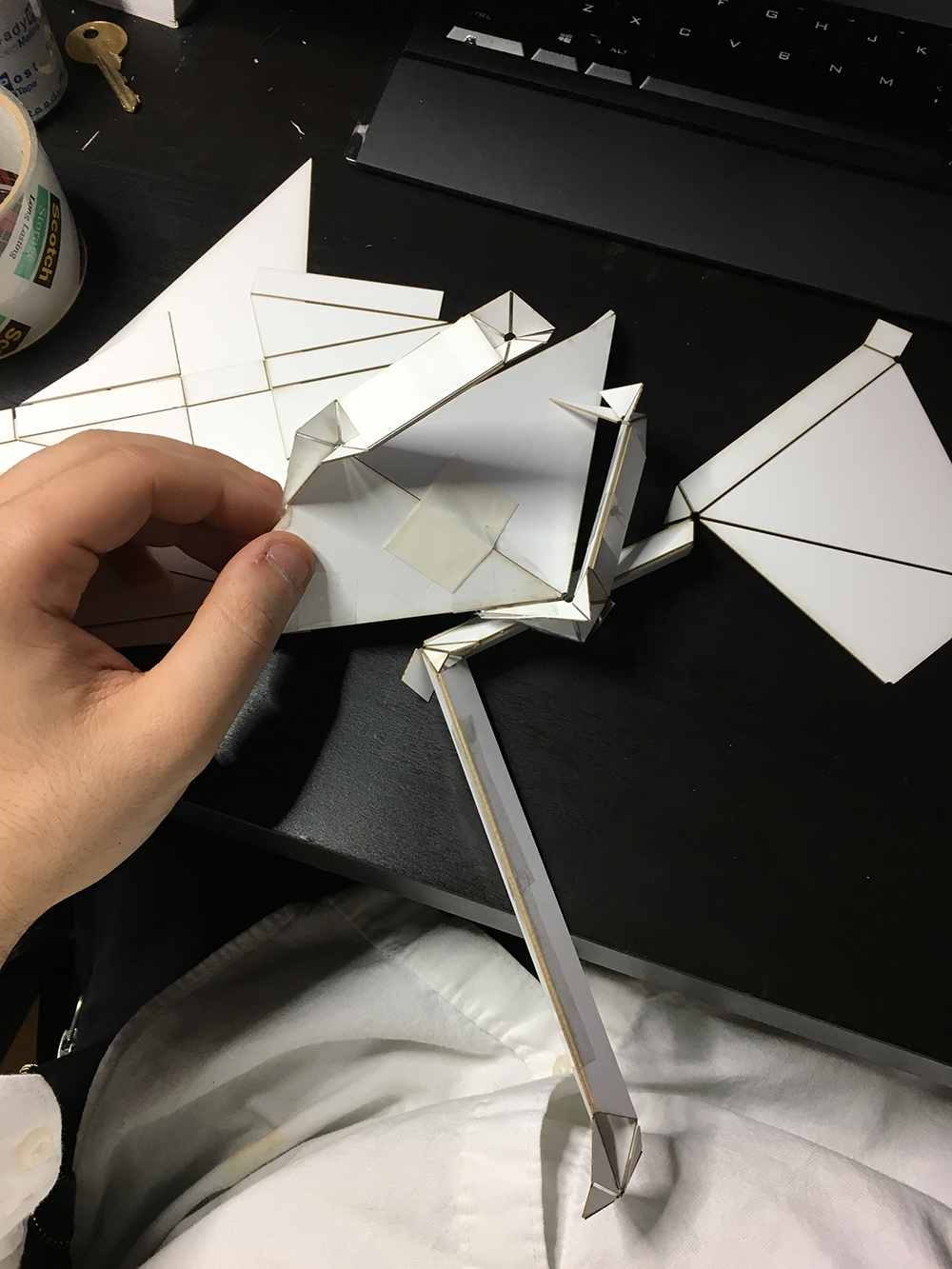
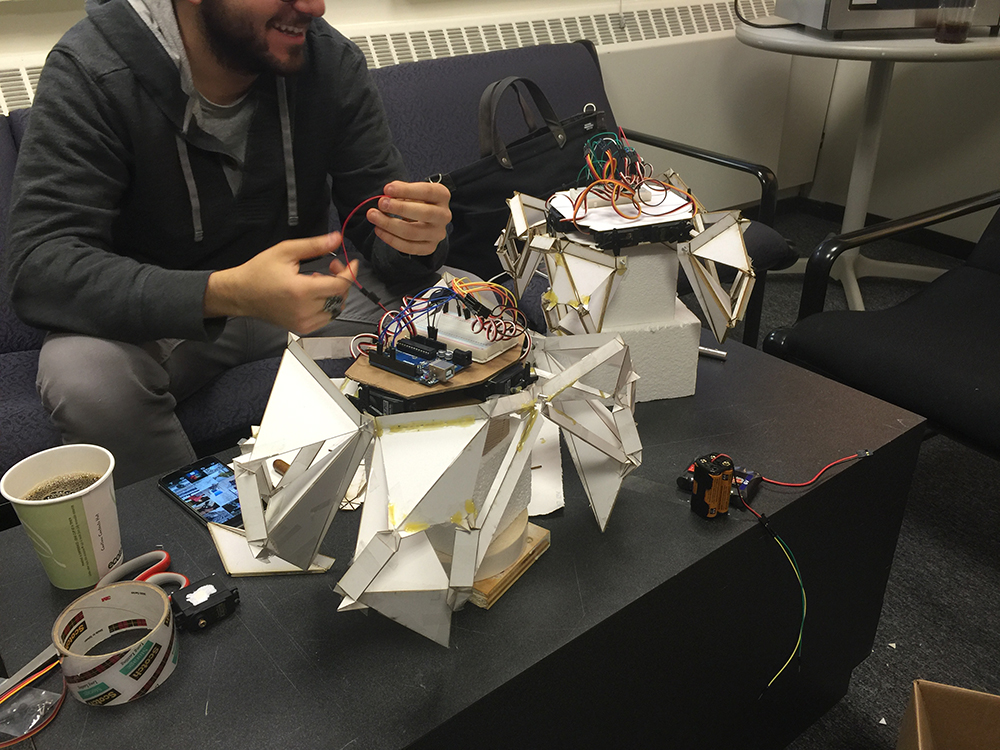
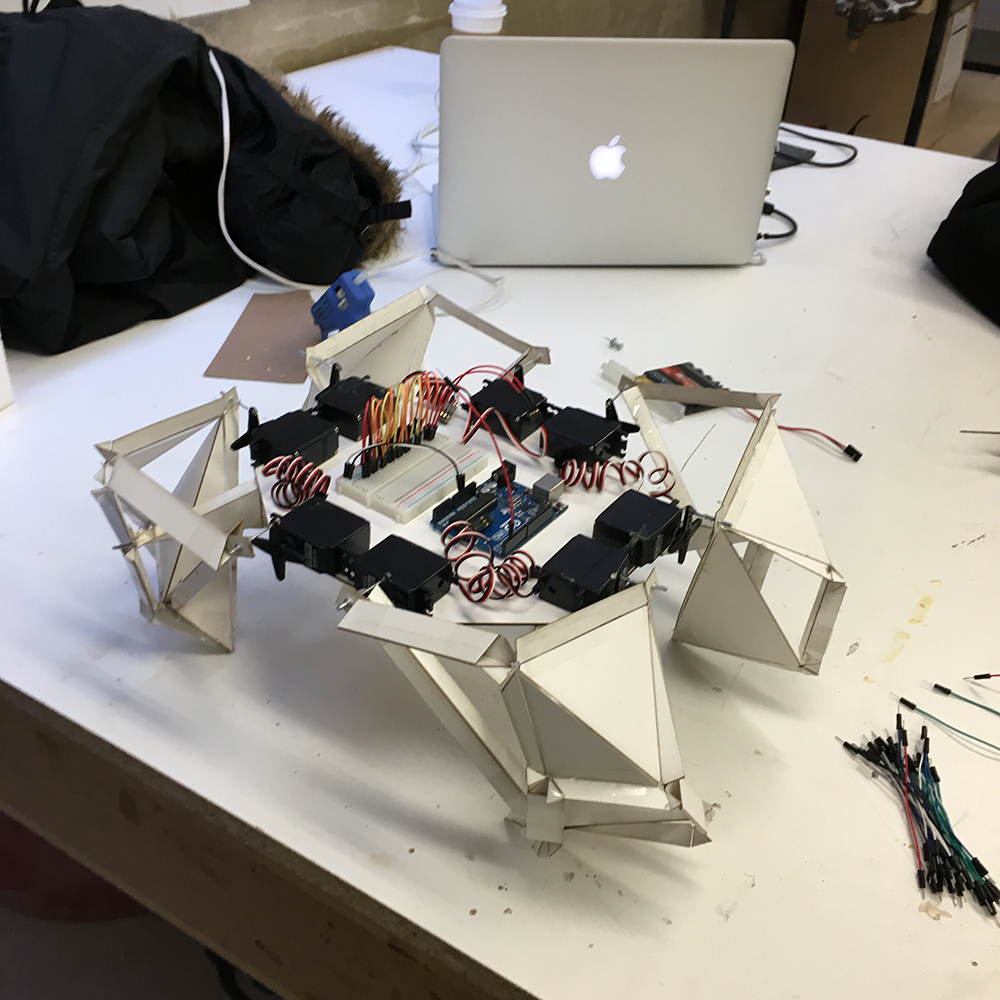
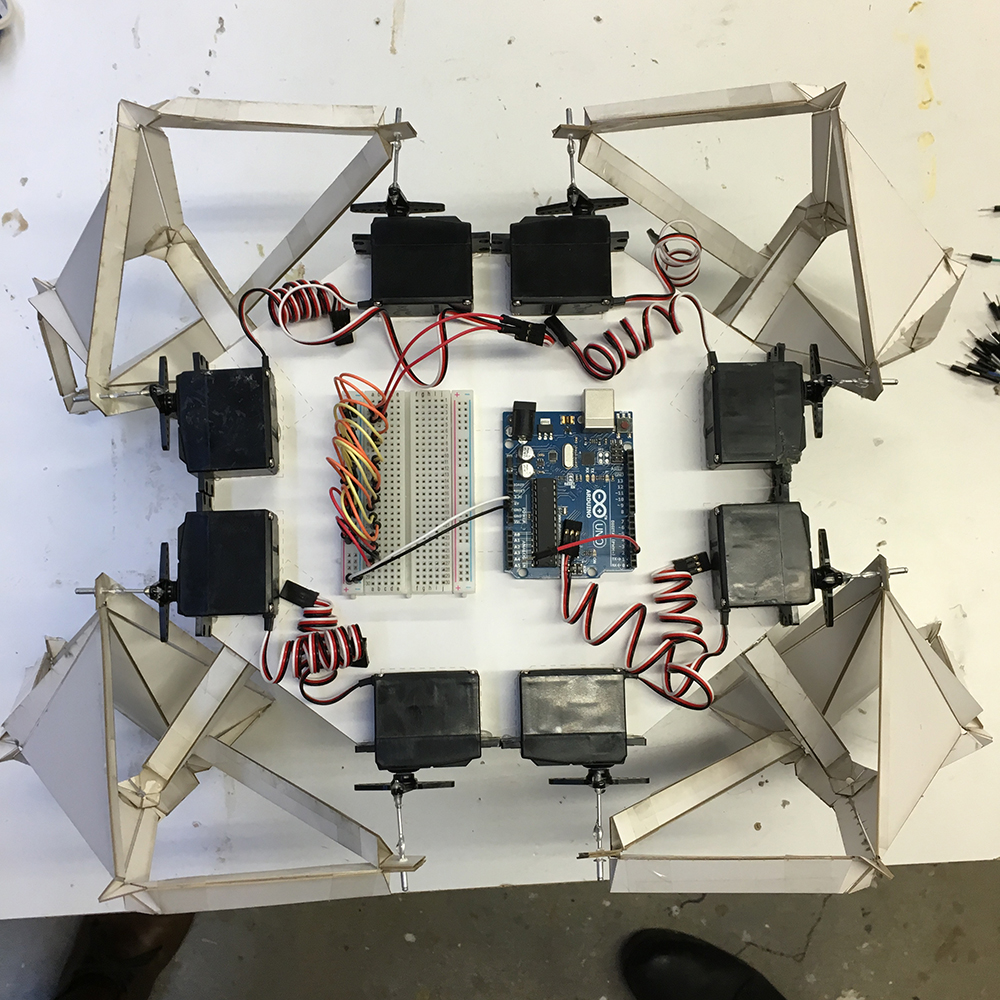
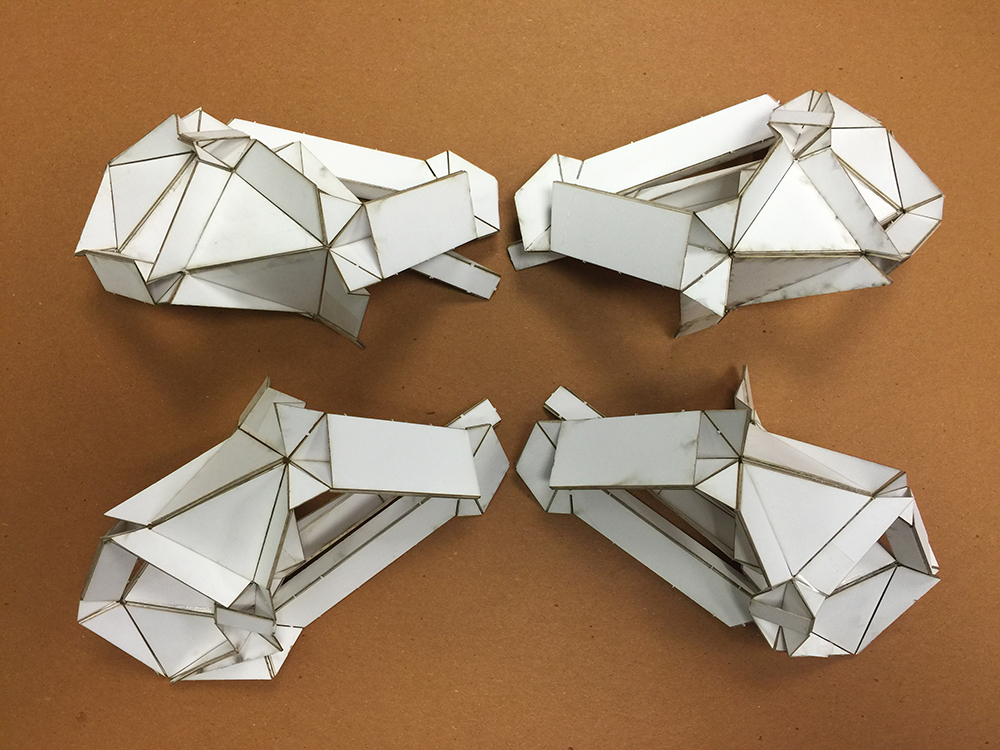
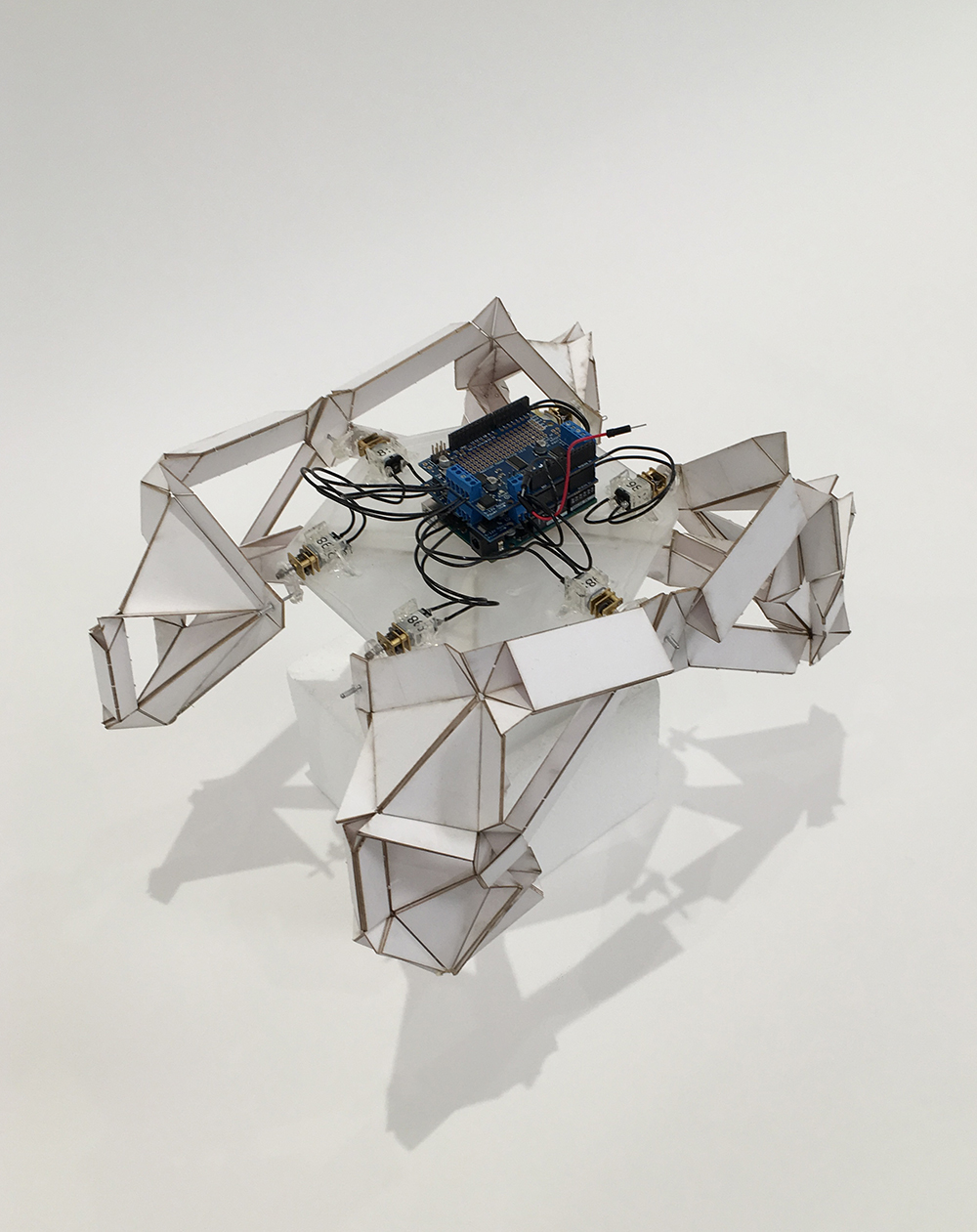
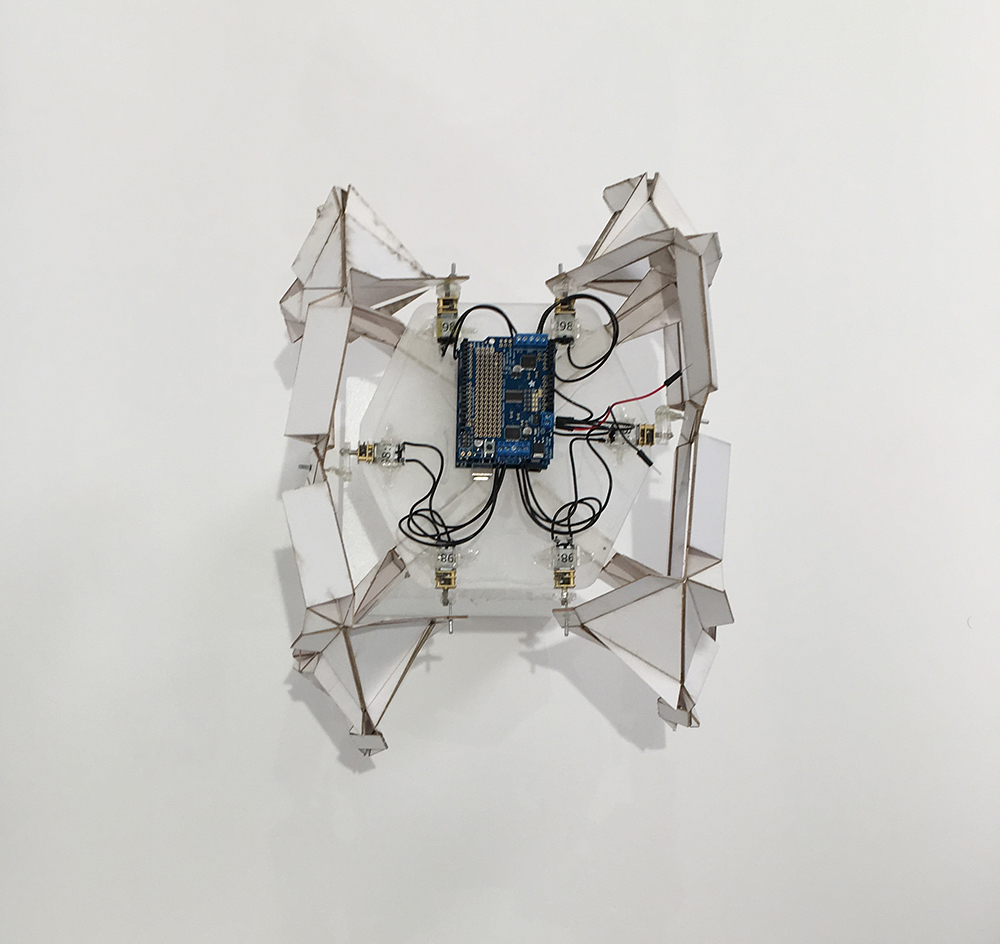
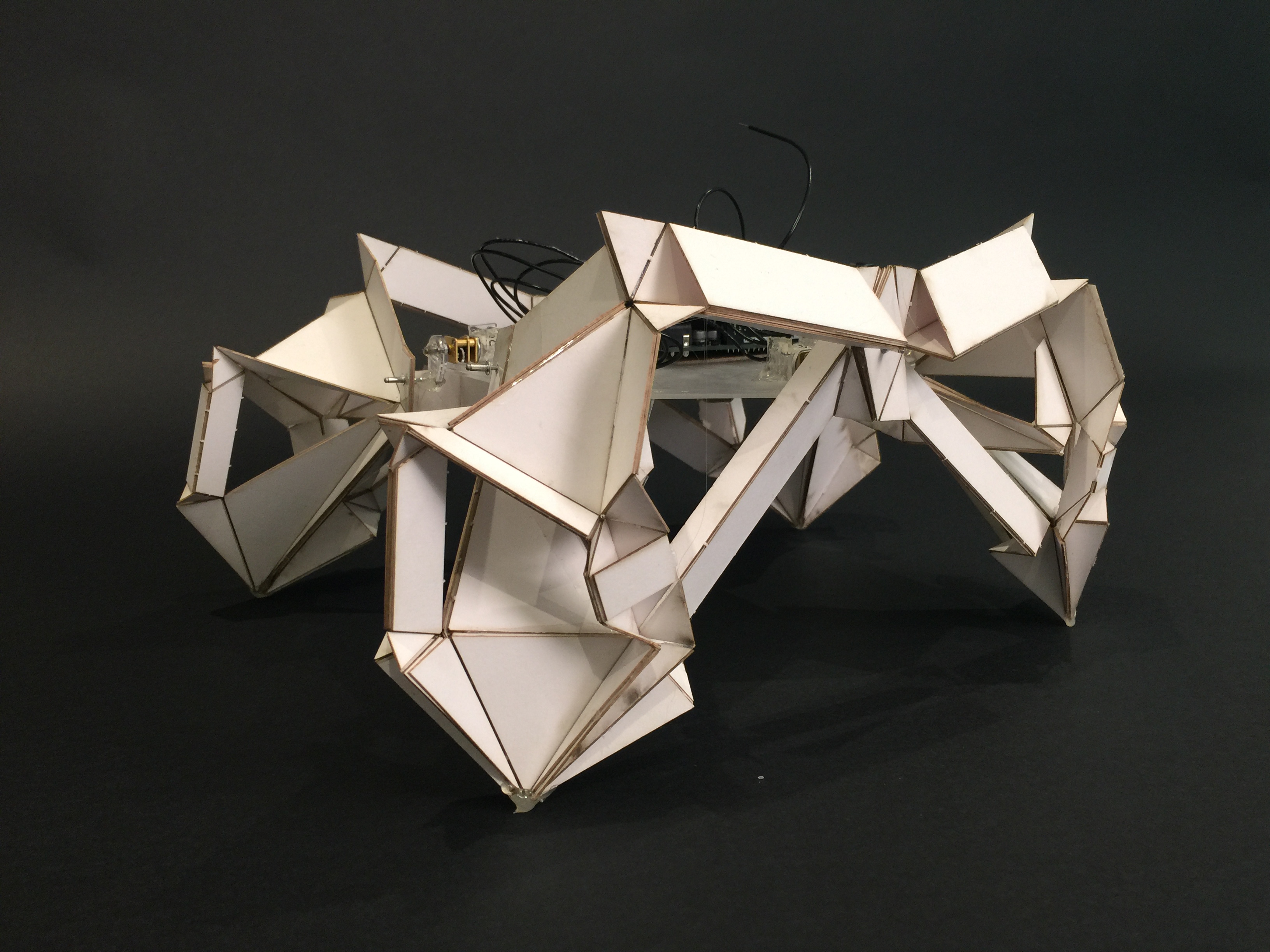
We then reframed how we thought about the idea of a joint, and instead approached it via a series of folding mechanisms. This allowed us to achieve the necessary action, but without the complicated
3d printing. By moving to folded paper joints, this greatly reduced the cost of production, as well as, consequently, the time required for production. The robot was therefore able
to walk forwards and backwards, as well as side to side, which is impossible for a non-3d Jansen mechanism to do.